 Products Home
Products HomeAPTモジュール型ピエゾコントローラー

- Two High Power Drive Outputs – 75 V, 500 mA
- Strain Gauge Closed Loop Nanometer Positioning
- Seamless Operation with Thorlabs Piezo Actuators
MPZ601
Full Suite of
Software Support
Tools Included










Please Wait
| APT™ Rack System Modules |
|---|
| 2-Channel Piezo Control Module |
| 2-Channel Stepper Motor Control Module |
| 2-Channel NanoTrak® Auto-Alignment Module |
| 2-Channel Brushless DC Motor Control Module |
| USB Motion Control 19" Rack Chassis |
| 当社のラックシステムモジュールには、APT™ラックシステムMMR601またはMMR602をご使用ください。筐体外でモジュールを独立して操作することはできません。 |
特長
- 高分解能位置制御 (微調整用途向け)
- ランプ電圧/波形発生機能 (スキャン用途向け)
- 高帯域幅 (10 kHz) ピエゾ位置決め
- 当社のピエゾアクチュエータ用自動設定機能
- 制御用コントローラーデジタル I/O ポート
- ユーザI/Oポート(ロジック入力/出力、ポテンショメータ入力)
- 制御用ソフトウェア一式が付属
- 直観的に使えるソフトウェアグラフィカル制御パネル
- 拡張ActiveX®プログラミング・インターフェイス
- 他のAPT™ シリーズのコントローラとの完全統合(統合システム開発)
APT™ピエゾドライバーモジュールMPZ601は、2チャンネルのパワー(75 V、500 mA)ピエゾコントローラです。この製品は、当社の開ループおよび閉ループピエゾ内蔵ナノポジショニングアクチュエータおよびステージ全製品を駆動するように設計されています。このユニットの各チャンネルには、歪みゲージフィードバック回路が装備されているので、当社のアクチュエータと使用して、ナノメータ領域での閉ループ位置決め操作を行う事ができます。更に、フレキシブルなソフトウエアの設定は、これらの製品の設定を細かく変えられるので、他社製品の様々なピエゾ素子を駆動するのにも適しています。このユニットは、波形発生機能とトリガ出力機能により、ピエゾによるスキャン用途に特に適しています。
このモジュールには、最新の高速デジタル信号プロセッサ(DSP)と低ノイズアナログ電子技術が組み込まれていて、適応性の高いAPTモーションコントロール19インチモジュールラックシステムMMR601またはMMR602に合うように設計されています。複数のモジュール型ピエゾコントローラMPZ601をこのラックシステムに装着して(1つのラックにつき、最大12チャンネルまでの操作が可能)、ナノメータレベルでのモーションコントロールが必要となる大規模なアライメント用途をサポートすることができます。
ラック筺体MMR601またはMMR602を介したUSB接続により、簡単にPC制御操作が可能です。さらに、複数のユニットを標準のUSBハブを使って、多軸モーションコントロール用途向けに、1台のPCに接続して制御することができます。これを使いやすいAPT ソフトウェアに統合することで、短時間でかなり複雑な移動シーケンスを作ることが可能です。例えば、関連するすべての操作パラメータは、当社のステージおよびアクチュエータ製品用に自動設定されています。拡張ActiveX®プログラミング環境を使って、高度なカスタムモーションコントロールやシーケンス も行なうことが可能です。 詳細は「モーションコントロールソフトウェア」および「APTチュートリアル」タブに掲載されています。
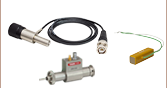
ケーブルについて
アクチュエータやステージをコントローラに接続するケーブルはアクチュエータやステージに付属しており、コントローラには付属しておりません。交換用のケーブルについてのお問い合わせは当社までご連絡ください。
| Other Piezo Driver Controllers | |||
|---|---|---|---|
| K-Cube™ Controller and Strain Gauge Reader Single-Channel | Open Loop Benchtop Controller 1- and 3-Channel | Closed Loop Benchtop Controller 1- and 3-Channel | Rack System Module 2-Channel |
モジュール仕様
| Specification | Value |
|---|---|
| Piezoelectric Output (SMC Male) - Per Channel | |
| Voltage (Software Control) | 0 to 75 V DC |
| Voltage (External Input) | -10 to 90 V DC |
| Current | 500 mA Max Continuous |
| Stability | 100 ppm Over 24 hours (After 30 mins Warm-Up Time) |
| Noise | < 3 mV RMS |
| Typical Piezo Capacitance | 1 to 10 µF |
| Bandwidth | 10 kHz (1 µF Load, 1 Vp-p) |
| Position Feedback (9-Pin D-type Female) - Per Channel | |
| Feedback Type | AC Bridge or 0-10 V Differential DC (SW Selectable) |
| AC Feedback Transducer Type | Strain Gauge |
| AC Detection Method | AC Bridge (18 kHz Excitation) |
| Typical AC Feedback Resolution | 5 nm (for 20 µm Actuator e.g. PAZ005) |
| Auto-Configure | Identification Resistance in Actuator |
| User Input/Output (26-Pin D-type Female) | |
| Potentiometer Input (per channel) | Reference + Wiper (50 kΩ 10 Turn Pots) |
| HV Output Monitor (per channel) | 0 to 10 V DC |
| 4 Digital Inputs | TTL Levels |
| 4 Digital Outputs | Open Collector |
| Trigger Input/Output | TTL |
| Trigger Input Functionality | Triggered Voltage Ramps/Waveforms |
| Trigger Output Functionality | Trigger Generation During Voltage Ramp Output |
| User 5 V (with Ground) 250 mA Max | |
| General | |
| Housing | Single APT™ Rack System Bay |
| Dimensions (W x D x H) | 190 x 270 x 50 mm (7.5" x 10.6" x 2") |
| Weight | 1.5 kg (3.3 lbs) |
ユーザI/Oコントローラ
Dタイプメス型
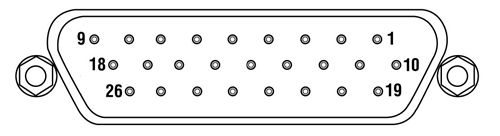
| Pin | Description | Return | Pin | Description | Return | Pin | Description | Return |
|---|---|---|---|---|---|---|---|---|
| 1 | DIG I/P 1a | 19 | 10 | DIG O/P 1a | 19 | 19 | Isolated Groundb | - |
| 2 | DIG I/P 2a | 19 | 11 | DIG O/P 2a | 19 | 20 | Ext Trigger I/P | 22 |
| 3 | DIG I/P 3a | 19 | 12 | DIG O/P 3a | 19 | 21 | Ext Trigger O/P | 22 |
| 4 | DIG I/P 4a | 19 | 13 | DIG O/P 4a | 19 | 22 | Ground | - |
| 5 | Channel 1 RS485 (+) | - | 14 | Channel 2 RS485 (+) | - | 23 | 5 V User O/P (Isolated) | - |
| 6 | Channel 1 RS485 (-) | - | 15 | Channel 2 RS485 (+) | - | 24 | Not Used | - |
| 7 | Not Used | - | 16 | Not Used | - | 25 | Analog or Potentiometer Ground | - |
| 8 | Channel 2 10 V O/Pc | 25 | 17 | Potentiometer Wiper Ch 2 | - | 26 | Potentiometer Reference | 25 |
| 9 | Channel 1 10 V O/Pc | 25 | 18 | Potentiometer Wiper Ch 2 | - |
ピエゾコントローラ
Dタイプメス型
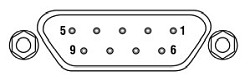
| Pin | Description | Return | Pin | Description | Return | Pin | Description | Return |
|---|---|---|---|---|---|---|---|---|
| 1 | Wheatstone Bridge Excitation | 4 or 6 | 4 | d.c.(+) or Equipment Groundc | - | 7 | d.c.(-) or Actuator ID Signalbc | 4 or 6 |
| 2 | +15Va | 4 or 6 | 5 | Feedback Signal In | 4 or 6 | 8 | RS485 (-) | 9 |
| 3 | -15Va | 4 or 6 | 6 | Equiptment Ground | - | 9 | RS485 (+) | 8 |
Ext In (+)およびExt In (-)
BNCメス型
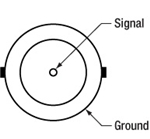
差動入力。この2つの入力の差動信号によって、HV増幅回路からの出力電圧を部分的に制御するように設定できます。 「Input Source」としてBNCオプションを含む設定にすると、ユニットは選択された他の入力信号(GUIパネルの「Output」制御でセットされた電圧、および外部ポテンショメータからの電圧)にこの差動信号を加算します。
HV Out
SMC

0~75 V、0~250 mA。 駆動信号をピエゾアクチュエータに送ります。
こちらのページでご覧いただくAPTビデオチュートリアルは、付属のATPユーティリティに関する説明と、いくつかのプログラミング環境におけるAPTシステムのプログラミングに関する説明の2つの部分から構成されています。
免責事項:これらの動画は、当初はAdobe Flashによって作成されました。2020年のAdobe Flashのサポート終了後、これらのチュートリアルは再録画されています。各動画の下にはFlash Playerの操作ボタンが見えますが、機能はしません。
APTコントローラには、APTUserユーティリティとAPTConfigユーティリティが付いています。APTUserを用いると、直感的操作が可能なグラフィック制御パネルを介して、APTで制御するハードウェアに素早く簡単に接続することができます。APTConfigは「オフライン」ユーティリティで、メカニカルステージのタイプを事前に選択し、それらを特定のモーションコントローラに対応付けるなど、システム全体のさまざまな設定を行うことができます。
APT Userユーティリティ
下の左側の動画では、APTUserユーティリティの操作概要について説明しています。シングルチャンネルコントローラのOptoDriverは、制御用のPCが無くても前面パネルのコントローラを介して操作できます。前面パネルのコントローラに保存されている操作に関する設定は、APTUserユーティリティを使用して変更することができます。そのプロセスは下の右側の動画でご覧いただけます。
APT Configユーティリティ
シミュレートされたハードウェア構成のセットアップや、メカニカルステージの特定のモータードライブチャンネルへの対応付けなど、APT Configユーティリティを使用してAPTシステム全体の様々な設定ができます。下の最初の動画ではAPT Configの概要をご覧いただけます。シミュレートされたハードウェア構成の作成方法やステージと対応付ける方法についての詳細は、その右側の2つの動画でご覧いただけます。
APTのプログラミング
APTソフトウェアシステムは、ActiveXコントロールのコレクションとして実装されています。ActiveXコントロールは言語に依存しないソフトウェアモジュールで、グラフィカルユーザーインターフェイスとプログラミングインターフェイスの両方を提供します。ハードウェアユニットのタイプごとにActiveXコントロールのタイプがあります。例えば、Motor ActiveXコントロールはすべてのタイプのAPTモーターコントローラ(DCまたはステッパ)の操作に対応します。ActiveXコントロールは多くのWindowsソフトウェア開発環境やソフトウェア言語で直接サポートされており、そのようなコントロールがカスタムアプリケーションに組み込まれると、そこに含まれるすべての機能が即座にアプリケーションで利用できるようになります。下の動画では、LabVIEW、Visual Basic、Visual C++によるAPT ActiveXコントロールの基本的な使用方法について説明しています。これ以外に、LabWindows CVI、C++ Builder、VB.NET、C#.NET、Office VBA、Matlab、HPVEEなどの多数の言語でもActiveXはサポートされています。これらの言語環境についてはチュートリアルのビデオでは特に取り上げていませんが、動画内の考え方の多くは他の言語環境でも適切に使用できます。
Visual Basic
Part 1ではVisual Basicで動作するAPT ActiveXコントロールを設定する方法について説明しており、Part 2では独自の位置決めシーケンスをプログラミングする方法について説明しています。
LabVIEW
LabVIEWはActiveXをフルサポートしています。下の一連のチュートリアルビデオでは、APTによる独自のモーションコントロールシーケンスを作製する際の基本的な構成要素を示しています。まずソフトウェア開発中にオンラインヘルプを呼び出す方法をご紹介します。Part 2ではAPT ActiveXコントロールの作成方法をご紹介します。ActiveXコントロールではメソッド(機能)とプロパティ(数値設定)の両方を設定できます。Part 3と4では、ActiveXコントロールで示されたメソッドとプロパティを作成してワイヤで接続する方法をご紹介します。最後に、Part 5では全体をまとめて、独自の移動シーケンスを実行するLabVIEWのプログラム例をご紹介します。
Part 1:オンラインヘルプへのアクセス方法
Part 2:ActiveXコントロールの作成方法
Part 3:ActiveXのメソッドの作成方法
Part 4:ActiveXのプロパティの作成方法
Part 5:ActiveXコントロールの開始方法
下のチュートリアルビデオでは、メソッドおよびプロパティのノードを作成する別の方法について説明しています。
ActiveXメソッドの作成方法(別の方法)
ActiveXプロパティの作成方法(別の方法)
Visual C++
Part 1ではVisualC++で動作するAPT ActiveXコントロールを設定する方法について説明しており、Part 2では独自の位置決めシーケンスをプログラミングする方法について説明しています。
MATLAB
当社のAPTポジショナにMATLABおよびActiveXコントロールを使用する場合は、こちらの資料をご覧ください。
プログラマー向けとして、LabVIEWでAPTソフトウェアをプログラミングする方法もこちらからご覧いただけます。
ピエゾアクチュエータの帯域幅に関するチュートリアル
多くの高速用途では、ピエゾ素子の形状変化する速度を知ることが必須となります。 ピエゾコントローラとピエゾ積層の帯域幅は、下記の数値がわかることで、計算で求められるようになります。
- コントローラが供給可能な最大電流量。下記で例としてとりあげられているBPCシリーズのピエゾコントローラでは、この数値は0.5 Aです。
- ピエゾ素子の負荷容量。容量が大きいほどシステムは遅くなります。
- 信号振幅の最適値(V)。この振幅がピエゾ素子の伸長寸法を決定します。
- ドライバの最大帯域幅。この数値は駆動負荷に依存しません。
出力コンデンサを駆動する際には、帯電と放電にそれぞれ電流が必要です。 帯電電荷の変化dV/dtはスルーレートと呼ばれています。 静電容量が大きいほど、必要とされる電流量は大きくなります。
例えば100 µmのピエゾ積層において静電容量が20 µFで、最大電流量が0.5 AのBPCシリーズピエゾコントローラで駆動されるとき、スルーレートは下記の数式で求められます。

したがって電圧が瞬間的に0 V から75 Vに変化するとき、出力電圧が75 Vに達するには3 msかかります。
注記: これらの計算式においては、ドライバの最大帯域幅は計算によって得られる帯域幅よりもずっと大きな値であり、ドライバの帯域幅は制限要因とならないことを前提としています。 なおこれらの数式が、開ループシステムにしか適用できない点にご注意ください。 閉ループモードでは、フィードバックループの応答の遅延がさらに帯域幅を制限します。
正弦波信号

システムの帯域幅は、通常は所定の振幅の正弦信号に対するシステムの応答により規定します。 正弦信号のピーク振幅がA、ピーク‐ピーク電圧がVpp、そして周波数がfの条件で駆動されているピエゾ素子については、以下の数式が成立します。

右の図は、時間の経過とともに変化する電圧を表しています。 スルーレートの最大値、または電圧の最大の変化は、t = 2nπ, (n=0, 1, 2,...)が成立する時点となり、右図では点 aで示されています。

上記の数式から下記が導出できます。

それゆえに下記が成立します。
上記の例では最大電圧(75 V)での帯域幅は下記の値になることがわかります。
 .
.
ピエゾが小さく、静電容量が1/10になると、結果は10倍向上して約1060 Hzとなります。 また、積層が100 µmのままであっても、ピーク‐ピーク電圧が7.5 V(10% の最大振幅値)であれば、結果は同様に10倍向上して約1060 Hzとなります。

三角波信号
ピエゾアクチュエータが三角波で駆動される場合、最大電圧がVpeakで、最小電圧が 0の時、スルーレートは勾配もしくは下記に等しくなります。
![]() .
.
あるいはf = 1/Tであるので、下記が導出できます。


矩形波信号
ピエゾアクチュエータが矩形波で駆動される場合、最大電圧がVpeakで、最小電圧が 0の時、スルーレートが最小の立ち上がりと立ち下がりの数値を制限します。この条件では、信号の立ち上がりまたは立ち下がりの途中では、スルーレートは勾配に等しくなります。 trが最小立ち上がり時間であるとき、下記の数式が成り立ちます。
この式により、下記の数式が成立することもわかります。
 .
.
ピエゾの動作や理論についてはピエゾ素子のチュートリアルをご参照ください。
当社では幅広い種類のモーションコントローラを駆動できるよう、Kinesis® ソフトウェアパッケージと従来のAPT™(Advanced Positioning Technology)ソフトウェアパッケージの2種類のプラットフォームをご用意しております。どちらのパッケージも小型で低出力のシングルチャンネルドライバ(K-Cube™やT-Cube™など)から高出力でマルチチャンネルのモジュール式19インチラックナノポジショニングシステム(APTラックシステム)まで幅広い種類のモーションコントローラをカバーするKinesisシリーズのデバイスを制御できます。
Kinesisソフトウェアには、最新のC#、Visual Basic、LabVIEW™またはその他の.NETに対応する言語を使用してカスタムプログラムを作成するサードパーティの開発者向けに、.NETコントロールが付属しています。また、.NETフレームワークを使用しない用途向けに低級言語用のDLLライブラリも付いています。センターシーケンスマネージャが、当社の全てのモーションコントロールハードウェアの統合と同期をサポートします。

KinesisのGUIスクリーン
APTのGUIスクリーン
当社従来のAPTシステムソフトウェアプラットフォームは、C#、Visual Basic、LabVIEWまたはその他のActive-Xに対応する言語を使用してカスタムプログラムを作成するサードパーティの開発者向けに、ActiveXをベースとしたコントロールが付属しています。また、ハードウェア無しでカスタムプログラムの開発を行うためのシミュレーターモードも付いています。
これらの共通のソフトウェアプラットフォームにより、あらゆるKinesisとAPTコントローラをシングルアプリケーションに簡単に組み込むことができます。ソフトウェアツールは1セット習得するだけで共通した操作が可能です。シングルチャンネルシステムからマルチチャンネルシステムまで、あらゆるコントローラを組み合わせ、全てを1台のPCのソフトウェアインターフェイスから制御することが実現可能です。
このソフトウェアパッケージを使用するには2つの手段があります。GUI(グラフィカルユーザーインターフェイス)ユーティリティを使用したコントローラとの直接対話ならびに「out of the box」コントロール、またはご選択の開発言語でカスタム統合の位置決めやアライメントソリューションを簡単にプログラムできる一連のプログラミングインターフェイスです。
APTシステムソフトウェアをよりご理解いただけるために様々なチュートリアルビデオもご用意しております。ビデオではソフトウェアの概要とAPT Configユーティリティをご説明しています。また、ソフトウェアのシミュレーターモードを利用すると、コントローラを接続しないでソフトウェアを試すことができます。その方法を説明したビデオもあります。これらのビデオは「APTチュートリアル」タブ内のリンクからご覧いただけます。
ソフトウェア
Kinesis バージョン 1.14.49
このKinesisソフトウェアパッケージには、当社のKinesisならびにAPT™システムコントローラを制御するためのGUIが含まれています。
下記もご用意しております:
- 通信プロトコル
ソフトウェア
APT バージョン 3.21.6
このAPTソフトウェアパッケージには、当社のAPT™およびKinesisシステムコントローラを制御するためのGUIが含まれています。
下記もご用意しております:
- 通信プロトコル
| Posted Comments: | |
user
(posted 2024-05-07 14:25:45.367) I could not find in the Specs information the bit resolution of the MPZ601 controller. Does Thorlabs have that information available? E.g., what is the smallest voltage step that this controller can achieve? spolineni
(posted 2024-05-15 04:38:53.0) Thank you for your inquiry. The DAC used to generate the output voltage determines the theoretical resolution in open loop. Practical factors, including offset and gain variations, limit this to around 2 mV. Noise and non-linearity of the DAC affect the output, causing unequal step sizes and deviations from the ideal linear progression. These factors collectively determine the complex, multi-variable performance. Mike Jaris
(posted 2021-09-20 14:44:27.423) Why is there a USB symbol next to this device that does not have a USB port?? cwright
(posted 2021-09-21 05:30:12.0) Response from Charles at Thorlabs: Thank you for your query. These modules are intended for use in the MMR601 Rack Enclosure which provides USB connectivity for up to six modules. Laurie
(posted 2009-02-05 15:34:15.0) Response from Laurie at Thorlabs to melsscal: Thank you for your inquiry about our MPZ601, which can work as piezo controller. However, if you want nano track function for auto alignment, youll need to use the MNA601 controller module, which requires either the MMR601 or MMR602 chassis. Each controller module has two channels, so if you wish to control all three channels, youll need two modules. Please contact our technical support department if youd like to discuss your particular application with someone. melsscal
(posted 2009-02-05 03:51:52.0) Can we use MPZ601 with MAX313/M as nano track controller ? |