 Products Home / 電動ステージ / 電動直線移動ステージ(リニアステージ):移動量100 mm以上 / ブラシレスDCサーボモーター直線移動ステージ(リニアステージ)、ダイレクトドライブ型、移動量600 mm
Products Home / 電動ステージ / 電動直線移動ステージ(リニアステージ):移動量100 mm以上 / ブラシレスDCサーボモーター直線移動ステージ(リニアステージ)、ダイレクトドライブ型、移動量600 mmブラシレスDCサーボモーター直線移動ステージ(リニアステージ)、ダイレクトドライブ型、移動量600 mm

- 600 mm Travel at Speeds Up to 400 mm/s
- Brushless DC Servo Motor
- Bidirectional Repeatability of ±0.25 µm
DDSA04
Platform
Height Adapter
BBD301
1-Channel Controller
(Sold Separately)
MJC2
2-Axis Joystick
DDS600
600 mm (23.6") Servo Motor Translation Stage






Please Wait
| Key Specificationsa | |
|---|---|
| Travel Range | 600 mm (23.6") |
| Speed (Max) | 400 mm/s |
| Acceleration (Max)b | 10 000 mm/s2 |
| Bidirectional Repeatability | ±0.25 µm |
| Backlashc | N/A |
| Horizontal Load Capacity (Max)d | 10.0 kg (22.0 lbs) |
| Min Achievable Incremental Movement | 100 nm |
| Absolute On-Axis Accuracy | ±12.0 µm |
| Cable Length | 2.2 m (7.2') |
| Required Controllere | Benchtop: BBD30x; Rackmount: RBD201, MBD602 |
| Stage Dimensions (L x W x H) | 800 mm x 130 mm x 50 mm (31.5" x 5.12" x 1.97") |
| Motorized Linear Translation Stages | |
|---|---|
| 100 mm | Stepper |
| DC Servo | |
| 150 mm | Stepper |
| Stepper with Integrated Controller | |
| 220 mm | DC Servo |
| 300 mm | Stepper with Integrated Controller |
| DC Servo | |
| 600 mm | DC Servo |
| Optical Delay Line Kits | |
| Other Translation Stages | |
特長
- 移動量:600 mm
- 最大400 mm/sの高速移動
- 高さ50 mmの薄型
- ブラシレスDCリニアサーボモータ内蔵
- 高品質で精密なリニアベアリング
- コントローラは別売り(右表参照)
- 下記のアクセサリをご用意
- 62.5 mmのプラットフォーム高さに対応する高さ調整アダプタ
- 精密手動制御用2軸または3軸ジョイスティック
当社の薄型ダイレクトドライブ直線移動ステージ(リニアステージ)DDS600/Mは、100 nmの分解能で移動量600 mm、最高速度400 mm/sの性能を有する製品です。この自動ステージは、自動アライメント、表面検査、マッピング、プロービングをはじめとする高速および高確度の位置決めが必要な用途に適しています。
ブラシレスリニアモータを内蔵した薄型設計を採用したことで、機械的な衝突や移動プラットフォームにアクセスする際の妨げの原因となる外部筐体を取り除きました。ダイレクトドライブ技術は送りネジを必要としないのでバックラッシュがなくなります。また内部のフレキシブルダクトによって機構部分が動いた時にケーブルが引っ掛かりません。精密溝付きの2つのリニアベアリングにより、高い軸確度(±12 µm)で優れた剛性と線形性が発揮されます。バックラッシュのない操作性と高分解能の閉ループ光学フィードバックにより、±0.25 μmという高い双方向再現性が得られています。
注:
このステージは垂直方向(Z軸)の移動には適していません。また、電源が入ってないときのプラットフォームはロックされていない状態(フリーラン状態)になります。そのため、電源が入ってないときには定めた位置に留まっていることが求められる用途には適しません。
コントローラ
当社ではこのステージの駆動用に、1、2または3チャンネルのベンチトップ型ブラシレスDCモーターコントローラBBD30x (別売り、下記参照)をお勧めいたします。どのコントローラもS字加減速を設定できるので、振動や衝撃の無い、高速でスムーズな位置決めが可能です。高速動作(数百mm/s)で高いエンコーダ分解能(< 100nm)が求められるモーションコントロール用途に適しています。最新のデジタルとアナログ技術とともに広帯域幅およびハイパワーサーボコントロール回路を採用しています。コントローラは、既存システムに簡単に組み込むためのKinesisソフトウェアと共に発送されます。ブラシレスDCモーターコントローラの製品概要については下記をご覧ください。またはこちらをクリックして詳しい製品説明をご参照ください。
当社では19インチラック用のラックマウント型コントローラRBD201や19インチラック型モーションコントロール用シャーシMMR60x用に設計されたコントローラーモジュールMBD602もご用意しております。これらのコントローラは、ダイレクトドライブ型リニア移動ステージDDS600/Mに対応するため、使用することで多軸モータ制御による複雑なシステムのカスタマイズが可能です。
ジョイスティック
遠隔での位置決め制御用に、2軸ジョイスティックMJC2と3軸ジョイスティックMJC3をご用意しています。詳細は下記をご覧ください。なお2つの移動ステージを同時に制御するときには多軸のコントローラが必要です。
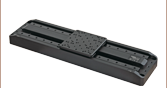
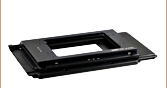
高さ調整アダプタープレート
ライザープレートDDSA04/Mを追加してステージのデッキ高を62.5 mmに上げることで、当社のNanoMax、MicroBlockや RollerBlockステージの高さに合わせることができます。
| Item # | DDS600(/M)a,b | |
|---|---|---|
| Travel Range | 600 mm (23.6") | |
| Speed (Max) | 400 mm/s | |
| Acceleration (Max)c | 10 000 mm/s2 | |
| Bidirectional Repeatability | ±0.25 µm | |
| Backlashd | N/A | |
| Encoder Resolution | 50 nm | |
| Minimum Achievable Incremental Movement | 100 nm | |
| Horizontal Load Capacity (Max)e | 10.0 kg (22.0 lbs) | |
| Absolute On-Axis Accuracy | ±12.0 µm | |
| Straightness/Flatness | ±10.0 µm | |
| Pitch | ±100 µrad | |
| Yaw | ±75 µrad | |
| Continuous Motor Force | 10.0 N | |
| Peak Motor Force (2 s) | 20.0 N | |
| Bearing Type | High Rigidity, Recirculating, Precision Linear Bearings | |
| Limit Switches | Magnetic Sensor at Each End of Stage | |
| Operating Temperature Rangef | 5 to 40 °C (41 to 104 °F) | |
| Motor Type | Brushless DC Linear Motor | |
| Cable Length | 2.2 m (7.2') | |
| Dimensions | 800 mm x 130 mm x 50 mm (31.5" x 5.12" x 1.97") | |
| Mass (Weight) | Excluding Cables | 8.8 kg (19.4 lbs) |
| Including Cables | 9.1 kg (20.0 lbs) | |
| Item # | BBD301 | BBD302 | BBD303 |
|---|---|---|---|
| Number of Channels | 1 | 2 | 3 |
| Drive Connector | 8 Pin DIN, Round, Female | ||
| Feedback Connector | 15-Pin D-Type, Female | ||
| Brushless Continuous Output | 2.5 A per Channel, 5 A Max All-Channel Total Output | ||
| Brushless Peak Output | 4.0 A per Channel, 5 A Max All-Channel Total Output | ||
| PWM Frequency | 40 kHz | ||
| Operating Modes | Position and Velocity | ||
| Control Algorithm | 16-Bit Digital PID Servo Loop with Velocity and Acceleration Feedforward | ||
| Velocity Profile | Trapezoidal/S-Curve | ||
| Position Count | 32 Bit | ||
| Position Feedback | Incremental Encoder | ||
| Encoder Bandwidth | 2.5 MHz (10 M Counts/sec) | ||
| Encoder Supply | 5 V | ||
| AUX Control Connector | 37-Pin D-Type Female (User Digital IO, 5 V O/P) | ||
| Front Panel Display | 4.3" Full-Color LCD, 480 x 272 Pixels | ||
| Input Power Requirements | 250 VA Voltage: 100 to 240 VAC Frequency: 47 to 63 Hz Fuse: 3.15 A | ||
| Dimensions (W x D x H) | 199.8 mm x 229.1 mm x 108.8 mm (7.87" x 9.02" x 4.28") | 250.0 mm x 279.1 mm x 108.8 mm (9.84" x 10.99" x 4.28") | 350.0 mm x 279.1 mm x 108.8 mm (13.78" x 10.99" x 4.28") |
| Mass (Weight) | 1.20 kg (2.65 lbs) | 1.70 kg (3.75 lbs) | 2.20 kg (4.85 lbs) |
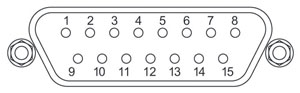
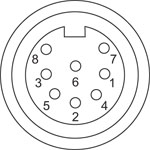
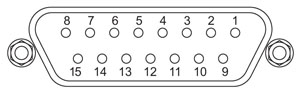
ステージDDS600/Mのピン配列
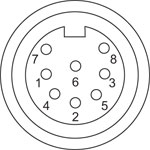
フライングリード終端にはオス型15ピンD‑サブコネクタとオス型8ピン円形DINコネクタが付いております。 ピンの詳細については下記をご覧ください。
フィードバックコネクタ
モータードライブコネクタ
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Not Used | 9 | Ground |
| 2 | Ground | 10 | Limit Switch + |
| 3 | Not Used | 11 | Limit Switch - |
| 4 | Enc Index - | 12 | Enc Index + |
| 5 | QB - | 13 | QB + |
| 6 | QA - | 14 | QA + |
| 7a | 5 V | 15 | Not Used |
| 8a | 5 V |
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Motor Phase B | 5 | Stage ID |
| 2 | GND | 6 | Enable |
| 3a | Unused (Motor Phase D) | 7 | Motor Phase C |
| 4 | Motor Phase A | 8a | +5 V |
コントローラBBD30xのピン配列
ステージ
DINコネクタ、メス
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Motor Phase B | 5 | Stage ID |
| 2 | GND | 6 | Enable |
| 3a | Unused (Motor Phase D) | 7 | Motor Phase C |
| 4 | Motor Phase A | 8a | +5 V |
フィードバック
D型コネクタ、メス
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Not Connected | 9 | GND |
| 2 | GND | 10 | Limit Switch + |
| 3 | Not Connected | 11 | Limit Switch - |
| 4 | Index - | 12 | Index + |
| 5 | QB - | 13 | QB + |
| 6 | QA - | 14 | QA + |
| 7a | 5 V | 15 | Not Connected |
| 8a | 5 V |
ハンドセット
Mini DINコネクタ、メス
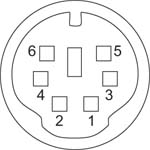
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | RX (Controller Input) | 4 | Supply Voltage for Handset 5 V |
| 2 | Ground | 5 | TX (Controller Output) |
| 3 | Ground | 6 | Ground |
補助I/O
D型コネクタ、メス

| Pin | Description | Pin | Description | Pin | Description | Pin | Description |
|---|---|---|---|---|---|---|---|
| 1 | RS232 TX | 11 | User Digital O/P 11+ | 21 | +5 V | 31 | User Digital O/P 4+ |
| 2 | RS232 RX | 12 | User Digital O/P 10- | 22 | User Digital I/P 3 | 32 | User Digital O/P 4- |
| 3 | Ground | 13 | User Digital O/P 10+ | 23 | User Digital I/P 2 | 33 | User Digital O/P 5+ |
| 4 | Differential I/P 2+ | 14 | User Digital O/P 9- | 24 | User Digital I/P 1 | 34 | User Digital O/P 5- |
| 5 | Differential I/P 2- | 15 | User Digital O/P 9+ | 25 | User Digital I/P 0 | 35 | User Digital O/P 6+ |
| 6 | Differential I/P 1- | 16 | User Digital O/P 8- | 26 | User Digital O/P 0 | 36 | User Digital O/P 6- |
| 7 | Differential I/P 1+ | 17 | User Digital O/P 8+ | 27 | User Digital O/P 1 | 37 | Ground |
| 8 | User Digital O/P 12- | 18 | User Digital O/P 7- | 28 | User Digital O/P 2 | - | - |
| 9 | User Digital O/P 12+ | 19 | User Digital O/P 7+ | 29 | User Digital O/P 3 | ||
| 10 | User Digital O/P 11- | 20 | +5 V | 30 | Ground |
USB
D型コネクタ、メス
I/O
BNCコネクタ、メス
5 V TTL
Software
Kinesis Version 1.14.49
The Kinesis Software Package, which includes a GUI for control of Thorlabs' Kinesis system controllers.
Also Available:
- Communications Protocol

Kinesis GUI Screen
Thorlabs offers the Kinesis® software package to drive our wide range of motion controllers. The software can be used to control devices in the Kinesis family, which covers a wide variety of motion controllers ranging from small, low-powered, single-channel drivers (such as the K-Cubes™) to high-power, multi-channel benchtop units and modular 19" rack nanopositioning systems (the MMR60x Rack System).
The Kinesis Software features .NET controls which can be used by 3rd party developers working in the latest C#, Visual Basic, LabVIEW™, or any .NET compatible languages to create custom applications. Low-level DLL libraries are included for applications not expected to use the .NET framework and APIs are included with each install. A Central Sequence Manager supports integration and synchronization of all Thorlabs motion control hardware.
By providing this common software platform, Thorlabs has ensured that users can mix and match any of our motion control devices in a single application, while only having to learn a single set of software tools. In this way, it is perfectly feasible to combine any of the controllers from single-axis to multi-axis systems and control all from a single, PC-based unified software interface.
The software package allows two methods of usage: graphical user interface (GUI) utilities for direct interaction with and control of the controllers 'out of the box', and a set of programming interfaces that allow custom-integrated positioning and alignment solutions to be easily programmed in the development language of choice.
Legacy Software
Select products are still capable of running the legacy APT™ software package. Information on software compatibility can be found in the product documentation ( ), and additional details about the APT software can be found here.
), and additional details about the APT software can be found here.
| Posted Comments: | |
Dr. Kiran Kabotu
(posted 2024-02-29 16:52:06.72) Dear Sandra,
Greetings of the day!
We are interested in procuring the following components,
1. DDS600/M
2. DDSA04/M
3. BBD303
4. MJC3
please send us the quotation.
We need an additional 50 mm travel in Y and Z directions, please add a compatible YZ stage in the quotation.
Is controller can be programmed with LabVIEW software?
Also, we need a 5-meter length USB cable for connecting the controller to the Laptop, please add a compatible USB cable in the quote.
What is the minimum step size for the Joystick? Is it compatible with a controller?
Thank you in advance for your support.
With regards, cstroud
(posted 2024-03-12 12:47:36.0) Thanks for reaching out. The joystick is controllable via Labview and is compatible with our benchtop brushless and benchtop stepper motor controllers. I will reach out to you directly to discuss the YZ stage and quote. xiong qin
(posted 2023-07-07 12:53:59.39) I bought a DDS600/M. Now, I want to know the fastest refresh rate of this product.In other word,how much time for the fastest reciprocating motion in a certain distance. do'neill
(posted 2023-07-20 06:43:00.0) Response from Daniel at Thorlabs. The max speed for the DDS600 is 400mm/s with regards to the speed at which you can send movement commands this will depend more on the controller than the stage and how you are sending the commands. I will reach out to you directly to discuss your application. David Goldovsky
(posted 2021-08-10 15:12:30.623) Hi Thorlabs,
I have a homing problem. After pressing the homing buttom from my BBD301, the stage enters 'homing' mode, goes to the middle position, comes back to the start, and stays there forever without changing status to 'homed' and the stage is stuck. The only way I can end the homing process is by manually playing with the controller knob after the stage stops from moving (by first moving the knob to the left, and then to the right. after that the status of the stage turns into 'homed' and I can use the stage).
in addition, while trying to operate the stage from my computer using the apt.dll (I am using a python wrapper library called 'thorlabs_apt'), I encounter similar problem: when I send the stage to a position, it changes status to 'moving', and even after the movement ended the 'moving' status never stops, hence i cannot give further commands to the stage, until I manually disable and then enable the device.
Any help would be appreciated,
Thanks! cwright
(posted 2021-08-10 06:27:29.0) Response from Charles at Thorlabs: Thank you for your query. We will reach out to you directly to diagnose this issue and support you with a solution. YLohia
(posted 2021-08-27 02:53:16.0) Thank you for your query. We will reach out to you directly to diagnose this issue and support you with a solution. Sergej Safonov
(posted 2021-06-18 07:48:13.76) Hello Thorlabs. An error occurs when using the delay line "DDS600/M". Kinesis detects the serial number and connection to the device, but the "Home" command does not work.
How to solve this problem? jcater
(posted 2021-06-18 09:15:34.0) Response from Jack at Thorlabs: Thank you for your feedback. To resolve this problem we advise updating to the most recent version of Kinesis, this can be downloaded from the website after this please ensure you have the most recent firmware flashed to your controller, this can be checked by opening the 'FirmwareUpdateUtility' found in C:\Program Files\Thorlabs\Kinesis\Firmware Update Utility. If, after pressing 'Discover Hardware' a '!' appears next to your controller you can update to the newest firmware by pressing 'Flash Firmware'.
We also advise that you change the 'Integral Limit' to 12,000 within the 'Current Loop' and 'Current Loop (Settled)' sections in the Advanced tab of the settings in Kinesis. To do this you will need to create custom settings. I will reach out to you directly to help further. Ori Golani
(posted 2021-06-07 19:25:58.767) Hi Thorlabs,
When using the control unit BBD301is it possible to get a position vs. time data after a movement was performed? This is needed in order to compensate for position and velocity errors in the measurement.
I looked into the controller’s manual and programming manual, but couldn’t find a command that records and outputs the position data throughout the movement (there is a command for getting the current position, but this is not good enough for characterizing the full position vs. time profile).
Thanks, Ori cwright
(posted 2021-06-08 08:10:15.0) Response from Charles at Thorlabs: Thank you for your query. Unfortunately there is not currently a way to create a data dump like that described from this controller. I would suggest the closest option is to use the 0x0491 status update command and set it in a loop to catch positional data. Craig Brideau
(posted 2020-11-04 23:00:34.66) I have added ~5kg to my stage and would like to adjust the motor control constants in Kinesis to give better performance. How do I do this? The constants in the "settings" pane in Kinesis are locked, and creating a custom configuration still doesn't unlock them. DJayasuriya
(posted 2020-11-06 04:11:31.0) Hi Craig, Thank you for your inquiry. After creating a custom configuration you would have to switch to 'start up' tab (note that this wont work in the 'current tab'). Then tick “Enable Restricted Settings” at the bottom of the window.
You should be allowed to edit the parameters in the “Position Loop”, “Current Loop”, “Track / Settle”, “Current Loop (Settled)” and “Motor Output” sections. After making the changers you should be able to save and apply the changers to the current device settings. DJayasuriya
(posted 2020-11-06 04:11:31.0) Hi Craig, Thank you for your inquiry. After creating a custom configuration you would have to switch to 'start up' tab (note that this wont work in the 'current tab'). Then tick “Enable Restricted Settings” at the bottom of the window.
You should be allowed to edit the parameters in the “Position Loop”, “Current Loop”, “Track / Settle”, “Current Loop (Settled)” and “Motor Output” sections. After making the changers you should be able to save and apply the changers to the current device settings. Konstantin Polyakov
(posted 2020-02-06 04:57:27.78) Hi, we have some questions about the DDS600/M. When the unit is turned on using the BBD201 and Kinesis, the platform cannot get to the Home position, which means that the hardware cannot be used. During use, when you press the Home command, the platform goes some way and stops, nothing else happens and the Not Homed indicator keeps flashing. The semicolon values in the Position window continue to fluctuate. No errors occur. The platform stops only at the value of 300 and never reaches 0. AManickavasagam
(posted 2020-02-07 07:26:09.0) Response from Arunthathi at Thorlabs: Thanks for your query. I have contacted you directly for some additional details to troubleshoot the issue. Mats Ärlelid
(posted 2019-05-15 11:21:11.86) Hi, I have a question regarding the accuracy of the speed translation, I can't find any spec on the accuracy and is it dependent on the speed? Are there other factors that could impact on accuracy such as load, controller etc.?
Thanks,
Mats rmiron
(posted 2019-05-16 10:24:56.0) Response from Radu at Thorlabs: Hello, Mats. I assume that you are looking for the velocity stability specification. Both load and the demanded velocity would have an impact on this specification. Unfortunately, we do not have sufficient test data to guarantee a certain performance level when it comes to velocity stability. With that being said, based on the internal data that I was able to find, assuming max velocity and no load, I expect the stability to be around +/- 1.5 mm/s.This stability specification improves significantly at lower velocities. If you contact your local tech support team and let them know what load you plan on placing on the stage and how fast you plan on moving it, they might be able to source some test data that is more relevant to your operating conditions. ygreddy
(posted 2017-06-30 01:20:32.29) Hello Thorlabs
We have purchased 600 mm Linear Motor stage & Controller (DDS600-E) which is extremely useful for research purpose. We can record our data minimum 4 nanosecond(delay), which is only possible with 600mm stage. Thanks and appreciations for providing such wonderful stages.
PS: LabVIEW example which is provided by you to work with real applications is not sufficient. The one which is provided by you only sufficient to connect to the stage and get the current position of the stage. But in real application we need to move the stage to different positions as well as record that position simultaneously while stage is moving. I request you to provide such labview example which really helpful for research purpose.
Thanks&Regards,
Y.G. Reddy
IISER-Pune
India bwood
(posted 2017-07-03 03:16:31.0) Response from Ben at Thorlabs: Thank you for your feedback. We are glad to hear the DDS600 stage is working well here, in the kind of high precision application it was built for. As regards the LabView examples, it is difficult to provide examples relevant to all applications, however we are constantly evolving our support documentation and I will relay this need to our software engineers. If you have any issues programing for our stages, please feel free to contact Thorlabs tech support with any questions you may have. |
電動リニアステージ
電動の直線移動ステージとしては、ピエゾ駆動の20 µm移動ステージからダイレクトドライブ方式の600 mm移動ステージまで、様々な最大移動量の製品をご用意しております。ステージの多くは、それらを用いてXY軸やXYZ軸などの多軸ステージを構築することができます。ファイバ結合用としては、多軸ステージのページをご覧ください。標準の電動ステージを用いるよりも精密な調整が可能です。直線移動ステージのほかに、電動の回転ステージおよびゴニオステージもご用意しております。また手動移動ステージもございます。
ピエゾステージ
これらのステージでは、様々な駆動機構にピエゾ素子が組み込まれています。ステージORIC®シリーズでは、「スティック-スリップ」と呼ばれる摩擦特性を利用したピエゾ慣性アクチュエータが用いられており、それにより長い移動距離が得られています。移動ステージNanoflex™シリーズは、手動アクチュエータに加えて標準的なピエゾアクチュエータが用いられています。ステージElliptec®シリーズでは共振ピエゾモータが用いられており、共振に伴うモータ先端の楕円形の動きで可動プラットフォームを押したり引いたりします。Z軸ステージLPS710E/Mにはピエゾ移動に対する機械的な増幅機構が組み込まれており、またそれに適したコントローラが付属しています。
| Piezoelectric Stages | ||||
|---|---|---|---|---|
| Product Family | ORIC® PDXZ1 Closed-Loop 4.5 mm Vertical Stage | ORIC® PD2 Open-Loop 5 mm Stage | ORIC® PDX2 Closed-Loop 5 mm Stage | |
| Click Photo to Enlarge |  |  |  | |
| Travel | 4.5 mm | 5 mm | ||
| Speed | 1 mm/s (Typ.)a | 10 mm/s (Typ. Max)b | 8 mm/s (Typ.)c | |
| Drive Type | Piezoelectric Inertia Drive | |||
| Possible Axis Configurations | Z | X, XY, XYZ | ||
| Mounting Surface Size | 45.0 mm x 42.0 mm | 13 mm x 13 mm | ||
| Additional Details | ||||
| Piezoelectric Stages | |||||
|---|---|---|---|---|---|
| Product Family | ORIC® PD1 Open-Loop 20 mm Stage | ORIC® PD1D Open-Loop 20 mm Monolithic XY Stage | ORIC® PDX1 Closed-Loop 20 mm Stage | ORIC® PD3 Open-Loop 50 mm Stage | |
| Click Photo to Enlarge |  |  | 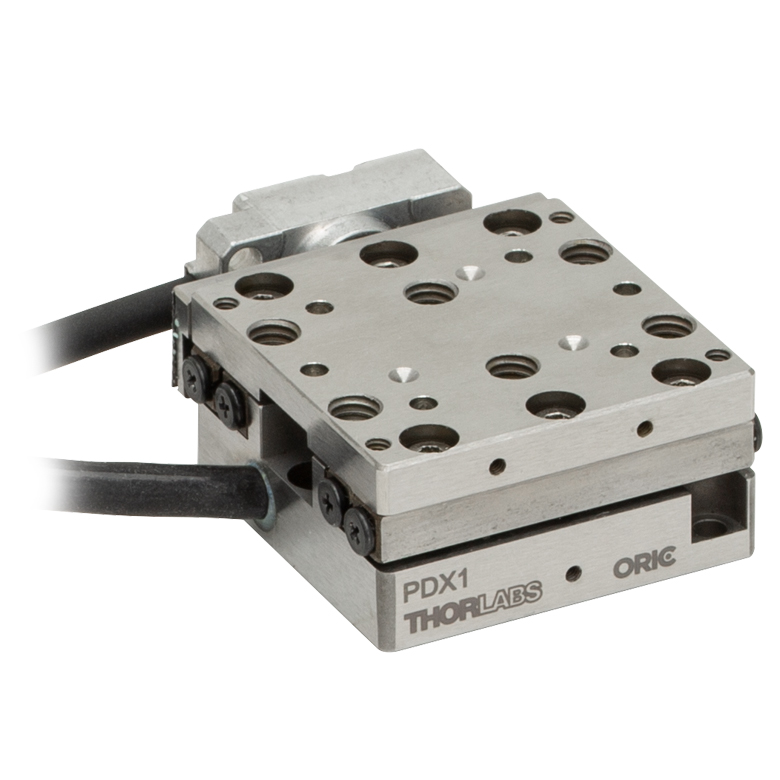 |  | |
| Travel | 20 mm | 50 mm | |||
| Speed | 3 mm/s (Typ. Max)a | 20 mm/s (Typ. Max)b | 10 mm/sc | ||
| Drive Type | Piezoelectric Inertia Drive | ||||
| Possible Axis Configurations | X, XY, XYZ | XY, XYZ | X, XY, XYZ | X, XY, XYZ | |
| Mounting Surface Size | 30 mm x 30 mm | 80 mm x 30 mm | |||
| Additional Details | |||||
| Piezoelectric Stages | ||||||
|---|---|---|---|---|---|---|
| Product Family | Nanoflex™ 20 µm Stage with 5 mm Actuator | Nanoflex™ 25 µm Stage with 1.5 mm Actuator | Elliptec® 28 mm Stage | Elliptec® 60 mm Stage | LPS710E 1.1 mm Vertical Stage | |
| Click Photo to Enlarge |  |  | 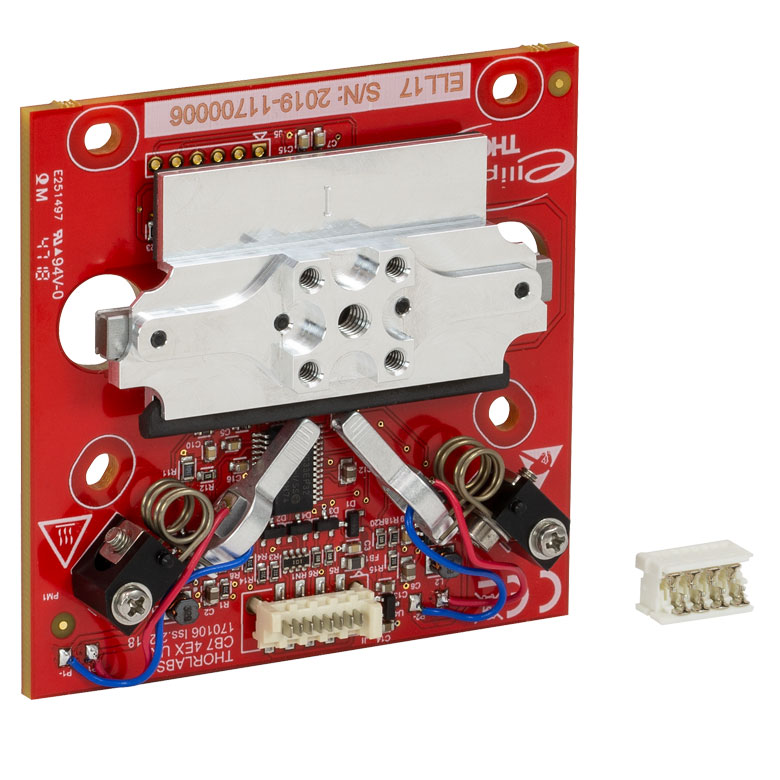 | 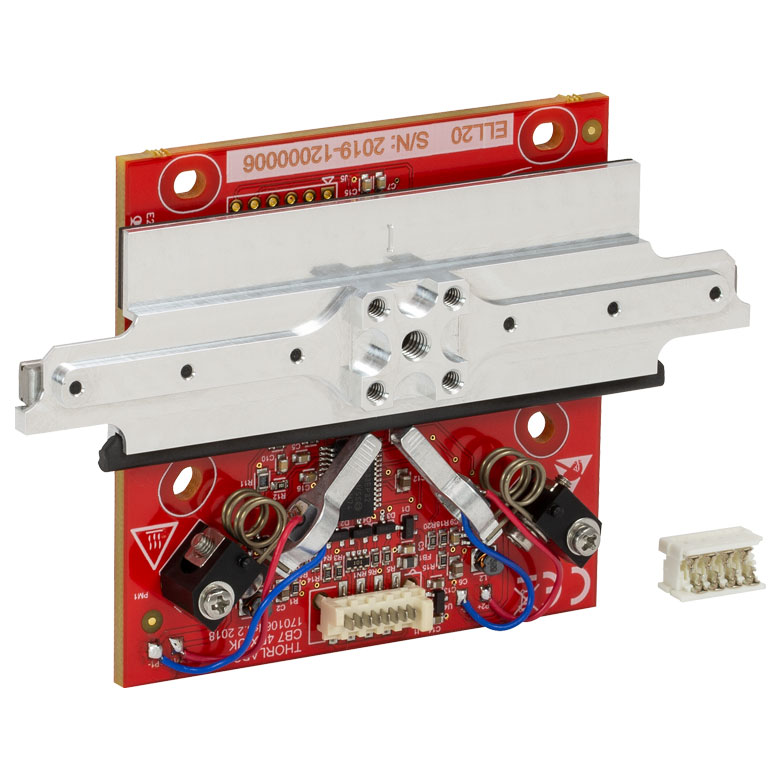 |  | |
| Travel | 20 µm + 5 mm Manual | 25 µm + 1.5 mm Manual | 28 mm | 60.0 mm | 1.1 mm | |
| Maximum Velocity | - | 180 mm/s | 90 mm/s | - | ||
| Drive Type | Piezo with Manual Actuator | Resonant Piezoelectric Motor | Amplified Piezo | |||
| Possible Axis Configurations | X, XY, XYZ | X | Z | |||
| Mounting Surface Size | 75 mm x 75 mm | 30 mm x 30 mm | 15 mm x 15 mm | 21 mm x 21 mm | ||
| Additional Details | ||||||
ステッピングモーターステージ
こちらの移動ステージは脱着型あるいは内蔵型のステッピングモータを用いており、また300 mmまでの長い移動量が可能です。ステージの多くは多軸構成(PLSXY)や、多軸ステージ(PLSX、LNRシリーズ、NRTシリーズ、LTSシリーズ)への組み込みが可能です。ステージMLJ150/Mは高荷重にも対応する垂直移動ステージです。
| Stepper Motor Stages | |||||
|---|---|---|---|---|---|
| Product Family | PLSX with and without PLST(/M) Top Plate 1" Stage | PLSXY with and without PLST(/M) Top Plate 1" Stage | LNR Series 25 mm Stage | LNR Series 50 mm Stage | |
| Click Photo to Enlarge |  |  |  |  | |
| Travel | 1" | 25 mm | 50 mm | ||
| Maximum Velocity | 7.0 mm/s | 2.0 mm/s | 50 mm/s | ||
| Possible Axis Configurations | X, XY | X, XY, XYZ | X, XY, XYZ | ||
| Mounting Surface Size | 3" x 3" | 60 mm x 60 mm | 100 mm x 100 mm | ||
| Additional Details | |||||
| Stepper Motor Stages | ||||||
|---|---|---|---|---|---|---|
| Product Family | NRT Series 100 mm Stage | NRT Series 150 mm Stage | LTS Series 150 mm Stage | LTS Series 300 mm Stage | MLJ250 50 mm Vertical Stage | |
| Click Photo to Enlarge |  |  |  |  |  | |
| Travel | 100 mm | 150 mm | 150 mm | 300 mm | 50 mm | |
| Maximum Velocity | 30 mm/s | 50 mm/s | 3.0 mm/s | |||
| Possible Axis Configurations | X, XY, XYZ | X, XY, XYZ | Z | |||
| Mounting Surface Size | 84 mm x 84 mm | 100 mm x 90 mm | 148 mm x 131 mm | |||
| Additional Details | ||||||
DCサーボモーターステージ
脱着型あるいは内蔵型のDCサーボモータを用いた直線移動ステージをご用意しております。これらのステージは薄型で、多軸ステージの構築が可能です。
| DC Servo Motor Stages | ||||
|---|---|---|---|---|
| Product Family | MT Series 12 mm Stages | PT Series 25 mm Stages | MTS Series 25 mm Stage | MTS Series 50 mm Stage |
| Click Photo to Enlarge |  |  |  |  |
| Travel | 12 mm | 25 mm | 25 mm | 50 mm |
| Maximum Velocity | 2.6 mm/s | 2.4 mm/s | ||
| Possible Axis Configurations | X, XY, XYZ | X, XY, XYZ | ||
| Mounting Surface Size | 61 mm x 61 mm | 101.6 mm x 76.2 mm | 43 mm x 43 mm | |
| Additional Details | ||||
| DC Servo Motor Stages | ||||
|---|---|---|---|---|
| Product Family | M30 Series 30 mm Stage | M30 Series 30 mm Monolithic XY Stage | M150 Series 150 mm XY Stage | KVS30 30 mm Vertical Stage |
| Click Photo to Enlarge |  |  |  |  |
| Travel | 30 mm | 150 mm | 30 mm | |
| Maximum Velocity | 2.4 mm/s | X-Axis: 170 mm/s Y-Axis: 230 mm/s | 8.0 mm/s | |
| Possible Axis Configurations | X, Z | XY, XZ | XY | Z |
| Mounting Surface Size | 115 mm x 115 mm | 272.4 mm x 272.4 mm | 116.2 mm x 116.2 mm | |
| Additional Details | ||||
ダイレクトドライブステージ
こちらの薄型ステージにはブラシレスDCサーボモータが内蔵されており、バックラッシュの無い高速移動が可能です。電源が入ってないときは、ステージのプラットフォームにはほとんど慣性が無く、実質的にフリーラン状態になります。そのため電源が入ってないときにステージのプラットフォームが定位置に留まる必要のある用途には適していません。これらのステージを垂直方向に取付けることは推奨しません。
| Direct Drive Stages | |||||
|---|---|---|---|---|---|
| Product Family | DDS Series 50 mm Stage | DDS Series 100 mm Stage | DDS Series 220 mm Stage | DDS Series 300 mm Stage | DDS Series 600 mm Stage |
| Click Photo to Enlarge |  |  |  |  |  |
| Travel | 50 mm | 100 mm | 220 mm | 300 mm | 600 mm |
| Maximum Velocity | 500 mm/s | 300 mm/s | 400 mm/s | 400 mm/s | |
| Possible Axis Configurations | X, XY | X, XY | X | X | |
| Mounting Surface Size | 60 mm x 52 mm | 88 mm x 88 mm | 120 mm x 120 mm | ||
| Additional Details | |||||

 ズーム
ズームDDS600/Mは高速移動と高い位置正確性が特長で、データ測定と同時にカメラやプローブを一定の速度で移動する必要がある表面マッピングや解析用途に適しています。別売りのジョイスティックMJC2またはMJC3(下記参照)を用いると高い正確度で微細な位置決めと制御が可能となります。
注:
このステージは垂直方向(Z軸)の移動には適していません。また、電源が入ってないときのプラットフォームはロックされていない状態(フリーラン状態)になります。そのため、電源が入ってないときには定めた位置に留まっていることが求められる用途には適しません。

 ズーム
ズーム当社では、上記のステージの制御用として、BBDシリーズブラシレスDCサーボモーターコントローラをお勧めします。コントローラはチャンネル数に応じて選択できます。単独のステージを使用する場合は、BBD301をご使用いただけます。ジョイスティックMJC2も使用する場合はBBD302をお勧めします。そのほかのアクセサリも使用する場合は、3チャンネルコントローラBBD303をお使いいただけます。3チャンネルのすべてを、ジョイスティックMJC3を介して制御できます。
S字加減速が自由に設定できるため、振動や衝撃の無い、スムーズな高速位置決めが可能です。したがって、これらのコントローラは、高速動作(数100mm/s)と高いエンコーダ分解能を必要とするモーションコントロールに適しています。このBBDシリーズコントローラは、最新のデジタルおよびアナログ技術と、高帯域で高パワーのサーボコントロール回路を使用しており、ブラシレスDCサーボモータを最大連続出力電流2.5 A (型番BBD301)または5 A (型番BBD302とBBD303)で駆動できるように設計されています。
これらのDCサーボコントローラでは、当社のKinesis®によるコントロール&プログラミングインターフェイスをご利用いただくことができますので、自動モーションコントロールのアプリケーションに簡単に組み込むことができます。PCとのインターフェイスとして、柔軟性を高めるためにUSBとRS232の両方を備えており、付属のソフトウェア開発キット(SDK)を用いてステージのPC自動制御が可能です。SDKはWindowsで動作する全ての主要な開発言語をサポートしており、ActiveXライブラリまたは従来のダイナミックリンクライブラリ(DLL)の形式で提供されます。
USB接続のプラグアンドプレイによって簡単にPCでの操作が可能になります。多軸のモーションコントロールを行う場合でも、標準的なUSBハブを介して複数のユニットを1台のPCに接続できます。この機能と使いやすいソフトウェアを組み合わせることで、複雑な動作シーケンスを短時間でプログラムして実行することができます。詳細は、ブラシレスDCサーボモーターコントローラの製品紹介ページをご参照下さい。

 ズーム
ズーム- USB HIDプロトコルを使用した信頼性の高いジョイスティック
- ジョイスティックノブによる2軸または3軸制御
- 高速または高精度の移動を実現する2種類のモード
- 感度調整のための速度ダイヤル
- リモート手動操作が可能
- PCを用いて再プログラム可能
- 人間工学に基づいた設計
ジョイスティックMJC2およびMJC3は顕微鏡ユーザ向けに設計されており、ステージの位置決めを手動で直感的に行うことができます。MJC2にはXY制御用に2軸のジョイスティックノブ、MJC3にはXYZ制御用に3軸のジョイスティックノブが付いています。どちらのジョイスティックノブも上下左右に動かすことができますが、MJC3のジョイスティックノブでは第3軸の制御機能として時計回りまたは反時計回りにひねることができます。また、ジョイスティックには高速移動と高精度移動を切り替えるプッシュボタンと、速度制御を微調整するためのスピードダイヤルも付いています。ほとんどの用途では、コントローラに保存されたデフォルトのパラメータ設定のままですぐにお使いいただくことができ、それ以上の設定は不要です。そのような使い方をするときはホストPCに接続する必要もなく、真のリモート操作が可能です。PCを使用してパラメータを再設定したとき、それをペアリングしたコントローラにも保存できます。そのため、PCとの接続を外してもリモート操作を継続できます。
ジョイスティックMJC2およびMJC3は、当社のベンチトップ型ブラシレスDCモーターコントローラ、ラックマウント型ブラシレスDCサーボコントローラ、 ブラシレスDCモーターコントローラーモジュール 、ブラシレスDCモーターコントローラーモジュール、ステッピングモーター用コントローラに対応します。これらのコントローラやUSB HIDクラスを使うセットアップと組み合わせて使用できるように、ジョイスティックにはMini-DINポートとUSB Type-Cポートの両方が付いています。また、6ピンMini-DINプラグ-プラグケーブルとUSB 3.1 Type-A - Type-Cケーブルの2本のケーブルが付属します。USB HIDを介したジョイスティックの構成やセットアップについての詳細は、型番横の赤いアイコン( )をクリックしてマニュアルをご覧ください。
)をクリックしてマニュアルをご覧ください。

 ズーム
ズーム
- ステージのデッキ高が当社のNanoMax 300、MicroBlock、ならびにRollerBlockステージと同じ62.5 mmになる高さ調整アダプタ
- プレート取り付け後の光軸高さ: 75.0 mm
- M6、M4、M3タップ穴が16個ずつ、計48個のタップ穴の配列
高さ調整アダプタDDSA04/Mは、移動ステージDDS600/Mのデッキ高を当社のNanoMax 300、MicroBlock、ならびにRollerBlockステージと同じ62.5 mmの高さになるよう設計されています。 このアダプタを使用することによって移動ステージDDS600/Mの光軸の高さは75.0 mmとなり、当社の溝付きアクセサリも使用可能となります。 高さ調整アダプタはM6 x 10 mmキャップスクリュを使用し移動プラットフォームに固定します。