 Products Home
Products Homeピエゾ慣性アクチュエーター付き回転ステージORIC®

- 360° Rotation Stages with Open- or Closed-Loop Positioning
- Piezo Inertia Drive Ideal for Set-and-Hold Applications
- Model with Maximum Speeds up to 100°/s with 30 µrad Typical Step Size When Driven with PDXC Controller
- Backlash-Free Operation
PDXR1
Stage with Optical Encoder,
Ø49.7 mm Platform
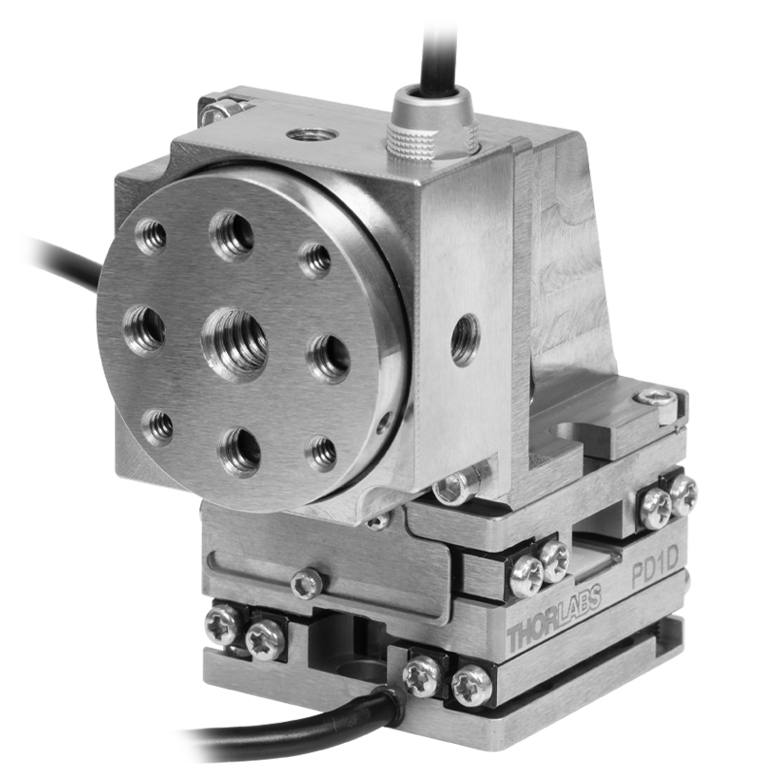
PDR1C
Compact Stage,
Ø28.0 mm Platform
PDR1V
Vacuum-Compatible Stage,
Ø34.0 mm Platform
U.S. Patent 11,606,045














Please Wait
| ORIC® Piezo Inertia Stage Selection Guide |
|---|
| 4.5 mm Vertical Translation Stage |
| 5 mm Linear Translation Stages |
| 20 mm Linear Translation Stages |
| 50 mm Linear Translation Stage |
| Rotation Stages |
| Vacuum-Compatible Stages |
| Quick Links | |
|---|---|
| Description | Platform Size |
| Compact Stage | Ø28.0 mm |
| Standard Stage | Ø34.0 mm |
| Vacuum-Compatible Stage | Ø34.0 mm |
| Stage with Optical Encoder | Ø49.7 mm |
| Dowel Pins | |
| Controllers | |

特長
- コンパクトなステンレススチール製ステージ、ピエゾ慣性アクチュエータ付き
- 高分解能での相対位置決めを求められる組み込み用(OEM用)や位置保持用などに適した製品
- 中央にビーム通過用またはオプトメカニクス取付け用として使用可能な貫通穴
- 数種類のステージをご用意(右表参照)
- 側面に ポスト取付け用のM4 x 0.7タップ穴
- 20 mmまたは50 mmステージと重ねることでXY + 回転ステージの構築が可能(下の写真参照)
- 移動量4.5 mmの垂直移動ステージと重ねて Z + 回転ステージの構築が可能
- ピエゾ慣性アクチュエータ用コントローラが別途必要
- 真空対応ステージは10-6 Torrまでの真空に対応
当社のコンパクトなピエゾ慣性アクチュエータ付き回転ステージORIC®のPDR1シリーズおよびPDXR1シリーズの製品(U.S. Patent 11,606,045) は、ピエゾ制御により安定な 360° 回転動作が可能です。PDR1シリーズのステージは開ループで動作し*、取付け機能や性能が異なる2種類のサイズの製品をご用意しています。一方、ステージPDXR1/Mには光学エンコーダが付いており、開ループ動作*と閉ループ動作の両方が可能です。何れのステージも、水平耐荷重は1 kgです。ステップサイズは負荷と駆動電圧に依存しますが、ステージを制御するための立ち上がり電圧と立ち下がり電圧を変更することで調整できます。詳細は「仕様」タブをご覧ください。長時間の連続ステップだけでなく、回転/保持モードでも使用可能です。PDR1V/MはPDR1/Mを真空対応型にしたもので、フライングリード線が付いています。

その他のORICステージへの取付けについて
こちらの回転ステージは、ORICシリーズの 20 mmまたは50 mm直線移動ステージと組合せて、XY + 回転ステージを構築することができます。右の写真の例では、20 mmモノリシックXYステージPD1D(/M)と回転ステージPDR1C(/M)を組合せています。回転ステージを垂直移動ステージPDXZ1/Mに取り付けて、Z + 回転ステージを構築することも可能です。
ステージPDR1/MまたはPDR1V/Mを、直線ステージPD1/MまたはXYステージPD1D/Mに取り付けるには、アダプタープレートPD1U/Mが必要です。回転ステージPDR1/MやPDR1V/Mは、ケージロッドER05-P4とアダプタープレートPD3T/Mを用いて、50 mm直線ステージPD3/M上に取り付けることも可能です。

Click to Enlarge
ピエゾ慣性アクチュエータの動作の簡略図
「スティック-スリップ」のサイクルは、ピエゾが緩やかに伸びるプロセスと、急速に縮むプロセスから構成されています。
ピエゾ慣性「スティック-スリップ」モータ
ピエゾ慣性モータは、フレクシャ機構と結合したピエゾアクチュエータ、摩擦要素、および回転プラットフォームの3つの主要パーツから構成されています。時計回りの回転の場合、サイクルの「スティック」の期間では、ピエゾはランプ関数の電圧波形に従って緩やかに伸び、摩擦要素と回転プラットフォームを同時に前方に押します。「スリップ」の期間では、駆動電圧が急速に低下するのに合わせて、ピエゾ素子は摩擦要素を「スリップ」させながら最初の長さに戻ります。この時、回転プラットフォームの慣性が十分大きく、一方で摩擦要素とプラットフォーム表面間の動摩擦係数が小さいため、このプロセスで回転プラットフォームが逆回転することはありません。右のグラフは「スティック-スリップ」の1サイクルにおけるピエゾ駆動電圧を示しています。
このサイクルを繰り返すことにより、ステージは時計回りに連続的に回転します。逆回転させるには、ピエゾが急速に伸びて緩やかに縮む(すなわち「スリップ-スティック」)ための、逆の電圧パターンが必要です。
*開ループ動作の場合は、使用条件やピエゾ素子のヒステリシス、部品のバラツキ、軸方向の負荷などの様々な要因によってステップサイズは変化し、また再現性もありません。この変化を解消するには、外部フィードバックシステムを使用して閉ループ動作をさせる必要があります。
| Item # | PDR1C(/M)a | |
|---|---|---|
| Driving Controller | PDXC or PDXC2 Benchtop Controller | KIM001 or KIM101 K-Cube Controllers |
| Rotation Range | 360° Continuous | |
| Step Size | 30 µrad (Typical)b; < 60 µrad (Max)c | 150 µrad (Typical)b; < 200 µrad (Max)c |
| Step Size Adjustabilityc | Up to 100% | None |
| Maximum Step Frequencyd | 20 kHz | 2 kHz |
| Maximum Speed (Continuous Stepping)e,f | 100°/s (Typical) | 30°/s (Typical) |
| Speed Variation Over Travel Range (Average)f | ±10% (Typical) | |
| Horizontal Load Capacity | 1 kg (2.2 lbs) | |
| Vertical Load Torque Capacityg | 10 mN•m | 15 mN•m |
| Holding Torque | 20 mN•m | |
| Wobble | ≤ 200 µrad | |
| Lifetimeh | > 10 Billion Steps | |
| Connector Type | Female SMC | |
| Cable Length | 1 m (3.3 ft)i | |
| Piezo Capacitance | 170 nF | |
| Operating Voltage | 125 V (Max) | |
| Operating Temperature | 10 to 40 °C (50 to 104 °F) | |
| Dimensions | 30.0 mm x 30.0 mm x 18.0 mm (1.18" x 1.18" x 0.71") | |
| Weight (Including Cable) | 96 g (3.39 oz) | |
| Required Controllerj (Sold Separately Below) | PDXC, PDXC2k, KIM001, or KIM101 | |
| Item # | PDR1(/M) | PDR1V(/M) |
|---|---|---|
| Driving Controller | KIM001 or KIM101 K-Cube Controllersa | |
| Rotation Range | 360° Continuous | |
| Step Size | 250 µrad (Typical)b; < 350 µrad (Max)c | |
| Step Size Adjustabilityc | Up to 30% | |
| Maximum Step Frequency | 2 kHz | |
| Maximum Speed (Continuous Stepping)d | 20°/s (Typical) | |
| Speed Variation Over Travel Range (Average)d | ±10% (Typical) | |
| Horizontal Load Capacity | 1 kg (2.2 lbs) | |
| Vertical Load Torque Capacitye | 15 mN•m | |
| Holding Torque | 25 mN•m | |
| Wobble | ≤ 200 µrad | |
| Lifetimef | > 10 Billion Steps | > 10 Billion Stepsg |
| Vacuum Compatibility | N/A | 10-6 Torr |
| Connector Type | Female SMC | Flying Leads Attached to Stage; Additional Bare Lead-to-SMC Female Cable Included |
| Cable Length | 1 m (3.3 ft)h | 0.75 m (2.48 ft) Flying Lead for Vacuum; 1.0 m (3.3 ft)i Cored Cable for Wiring Outside Chamber |
| Piezo Capacitance | 170 nF | |
| Operating Voltage | 125 V (Max) | |
| Operating Temperature | 10 to 40 °C (50 to 104 °F) | |
| Dimensions | 40.0 mm x 40.0 mm x 18.0 mm (1.57" x 1.57" x 0.71") | |
| Weight (Including Cable) | 151 g (5.33 oz) | 163 g (5.75 oz) |
| Required Controller (Sold Separately Below) | KIM001 or KIM101 | |
| Item # | PDXR1(/M)a |
|---|---|
| Driving Controller | PDXC Benchtop Controller |
| Rotation Range | 360° Continuous |
| Optical Encoder Resolution | 0.4365 µrad (0.09 arcsec) |
| Minimum Incremental Motionb | 0.873 µrad (0.18 arcsec) |
| Step Size | 0.01 to 999.0° Using PDXC Only 0.00005 to 180.0° Using Software |
| Step Frequency | 20 kHz |
| Speed Adjustment Range (Continuous Stepping)b,c | 10 to 30°/s (Typical) |
| Speed Variation Over Travel Range (Average)b | ±3% (Typical) |
| Horizontal Load Capacity | 1 kg (2.2 lbs) |
| Vertical Load Torque Capacityd | 15 mN•m |
| Holding Torque | 25 mN•m |
| Wobble | ≤ 200 µrad |
| Lifetimee | ≥ 210 000 Revolutions |
| Connector Type | 15-Pin D-Sub Female |
| Cable Lengthf | 1.5 m (4.9 ft), PDXCE Cable (Optional, Not Included): 3 m (9.8 ft) |
| Piezo Capacitance | 65 nF |
| Operating Voltage | 60 V (Max) |
| Operating Temperature | 10 to 40 °C (50 to 104 °F) |
| Dimensions | 56.0 mm x 56.0 mm x 23.0 mm (2.20" x 2.20" x 0.91") |
| Mass (Including Cable) | 380 g (13.4 oz) |
| Required Controller (Sold Separately Below) | PDXCg or PDXC2 |
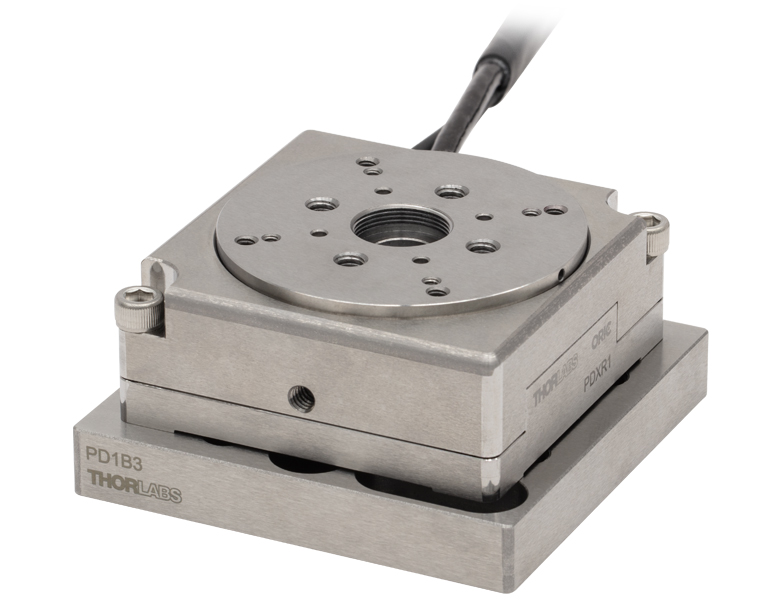
PDR1C/MとPDR1/M
SMC メス型

0~125 V
PDR1V/M
リード線
0~125 V
PTFE被覆、30 AWG
追加のケーブル
SMCメス型コネクタ付き*
0~125 V
*PD1V/MにはSMC端子にリード線の付いた追加のケーブルが付属します。
PDX1/M
Dサブ15ピン メス型
| Pin(s) | Voltage Range | Name | Description |
|---|---|---|---|
| 1 | -7.5 to +12.5 V | Encoder_B_N | Encoder B- |
| 2 | -7.5 to +12.5 V | Encoder_B_P | Encoder B+ |
| 3 | 0 V | GND | Digital Ground |
| 4 | -7.5 to +12.5 V | Encoder_A_N | Encoder A- |
| 5 | -7.5 to +12.5 V | Encoder_A_P | Encoder A+ |
| 6 | - | - | Reserved |
| 7 | - | - | Reserved |
| 8 | +5 V | +5 V | 5 V Power |
| 9 | -7.5 to +12.5 V | Encoder_Z_N | Encoder Z- |
| 10 | -7.5 to +12.5 V | Encoder_Z_P | Encoder Z+ |
| 11 | -10 to +50 V | SigOut2 | Piezo Output 2 |
| 12 | 0 V | PGND | Power Ground |
| 13 | -10 to +50 V | SigOut1 | Piezo Output 1 |
| 14 | 5 V TTL | EEPROM | 1-Wire EEPROM |
| 15 | - | - | Reserved |
注:このソフトウェアは、コントローラPDXCのみに対応します。コントローラPDXC2、KIM001およびKIM101にはご使用いただけません。
ソフトウェア
PDXCバージョン2.0.0
ソフトウェアパッケージPDXCには、GUI、ドライバ、およびサードパーティ開発用のLabVIEW™/C++/Python SDKが含まれています。
当社では、ピエゾステージ用コントローラPDXCを制御するためのPDXCソフトウェアパッケージをご用意しています。このコントローラは下記のピエゾ慣性アクチュエータ付きステージの駆動用に設計されています。
- 光学式エンコーダ付き4.5 mm垂直移動ステージPDXZ1/M
- 5 mm直線移動ステージPD2/M
- 光学式エンコーダ付き5 mm直線移動ステージPDX2/M
- 20 mm直線移動ステージPD1/M
- 真空対応20 mm直線移動ステージPD1V/M
- 20 mm XY移動モノリシックステージPD1D/M
- 光学式エンコーダ付き20 mm直線移動ステージPDX1/M
- 50 mm直線移動ステージPD3/M
- 回転ステージPDR1C/M
- 光学式エンコーダ付き回転ステージPDXR1/M
このソフトウェアパッケージには2つの使い方があります。1つはGUI(グラフィカルユーザーインターフェイス)ユーティリティを用いる方法で、コントローラの直接的な操作や制御をすぐに行なうことができます。もう1つはサードパーティ開発用の一連のプログラミングインターフェイス(LabVIEW™/C++/Python SDK)を用いる方法で、カスタム仕様の位置決めやアライメント用のプログラムをご希望の開発言語で簡単に作成することができます。
注: このソフトウェアは、コントローラ PDXC2、KIM001、KIM101に対応します。コントローラPDXCにはご使用いただけません。コントローラPDXC2はKinesis®ソフトウェアのみに対応しています。
ソフトウェア
Kinesisバージョン1.14.50
このKinesisソフトウェアパッケージには、当社のKinesisシステムコントローラを制御するためのGUIが含まれています。
下記もご用意しております。
- 通信プロトコル

KinesisソフトウェアのGUI画面
当社のKinesis®ソフトウェアパッケージを用いて、当社の様々なモーションコントローラを駆動することができます。このソフトウェアは小型で低出力のシングルチャンネルドライバ(K-Cubes™など)から、高出力でマルチチャンネルのベンチトップ型ユニットやモジュール型の19インチラックナノポジショニングシステム(ラックシステムMMR60x)まで、当社Kinesisシリーズの様々なモーションコントローラの制御用にご使用いただけます。
Kinesisソフトウェアでは.NETコントロールを使用できるため、最新のC#、Visual Basic、LabVIEW™、あるいはその他の.NET対応言語を使用してカスタムプログラムを作成することができます。.NETフレームワークの使用を想定していないアプリケーションのために、ローレベルのDLLライブラリも含まれています。また、APIは各インストールに含まれています。中央シーケンスマネージャ(Central Sequence Manager)は、当社のすべてのモーションコントロール用ハードウェアの統合と同期の機能をサポートしています。
この共通のソフトウェアプラットフォームにより、ユーザは単一のソフトウェアツールを習得するだけで、あらゆるモーションコントロールデバイスを1つのアプリケーション内で組み合わせて使用することができます。このように1軸システム用から多軸システム用までのあらゆるコントローラを組み合わせ、それら全てを1台のPCの統合されたソフトウェアインターフェイスから制御できます。
このソフトウェアパッケージには2つの使い方があります。1つはGUI(グラフィカルユーザーインターフェイス)ユーティリティを用いる方法で、コントローラの到着後すぐに直接的な操作と制御を行なうことができます。もう1つは一連のプログラミングインターフェイスを用いる方法で、ご希望の開発言語によりカスタム仕様の位置決めやアライメント用のプログラムを簡単に作成することができます。
APTソフトウェア
一部の製品はAPT™ソフトウェアパッケージでも操作が可能です。ソフトウェアに関する情報は、赤いアイコン( )内の資料に記載されています。APTソフトウェアの詳細については、こちらを参照してください。
)内の資料に記載されています。APTソフトウェアの詳細については、こちらを参照してください。
Kinesis®ソフトウェアでは新しい.NETコントロールが使用でき、最新の最新のC#, Visual Basic, LabVIEW™、ほかの.NET対応言語を使用する開発者がカスタムにプログラムを作成することもできます。
C#
このプログラミング言語はマルチプログラミングパラダイムやマルチプログラミング言語が使用可能となるよう設計されているため、複雑な問題が簡単かつ効率的に解決できます。型付け、命令型、宣言型、関数型、ジェネリック、オブジェクト指向、そしてコンポーネント指向が含まれます。 この共通のソフトウェアプラットフォームにより、1セットのソフトウェアツールを習得するだけで、あらゆるKinesisコントローラを簡単に組み合わせることができます。このようにして1軸システムのコントローラから多軸システムのコントローラまで、様々なコントローラを組み合わせ、全てを1台のPCのソフトウェアインターフェイスから制御することが可能となりました。
Kinesisシステムソフトウェアを使用するには2つの手段があります。コントローラを直接つないで制御を行なう付属のGUI(グラフィカルユーザーインターフェイス)ユーティリティ、またはご希望の開発言語でカスタム仕様の位置決めやアライメントを簡単にプログラムできる一連のプログラミングインターフェイスです。
Kinesisモーションコントロールライブラリの構築の参考となる実行可能なプロジェクト機能拡張例については下のリンクをクリックしてください。なお、Quick Startのプロジェクト例の実行には別の統合開発環境(IDE)(Microsoft Visual Studioなど)が必要です。C#のプロジェクト例はKinesisソフトウェアパッケージに付属する.NETコントロールで実行可能です(詳細は「Kinesisソフトウェア」タブをご覧ください)。
 | Click Here for the Kinesis with C# Quick Start Guide Click Here for C# Example Projects Click Here for Quick Start Device Control Examples | |
LabVIEW
LabVIEWは、.Netコントロールを介してKinesisまたはAPTベースのコントローラとの通信に使用できます。LabVIEWでは、ツールとオブジェクトでフロントパネルとして知られるユーザーインターフェイスを構築した後、グラフィカル表記の関数を使ってコードを追加し、フロントパネルのオブジェクトを制御します。下記のLabVIEWチュートリアルでは.Netコントロールを使用してLabVIEW内KinesisまたはAPT駆動デバイス用の制御GUIを作成するための情報をご提供しています。 LabVIEWでコントローラを制御する基本的な方法や、LabVIEW GUIを用いてデバイスを操作する前に行うべき設定の手順についても解説しています。
 | Click Here to View the LabVIEW Guide Click Here to View the Kinesis with LabVIEW Overview Page | |
仕様の性能を得るために
このアプリケーションノートでは、K-Cube™コントローラKIM001またはKIM101を用いて開ループ方式のORIC®直線移動ステージPD1/MとPD1D/M、および回転ステージPDR1/Mを使用するときに、仕様に示された速度とステップサイズを実現する方法をご説明いたします。下記ではKinesis®ソフトウェアのコントロールおよびK-Cubeの前面パネルの制御装置を用いた例をご紹介しています。開ループシステムを使用するには様々な制限があり、このアプリケーションノートは速度とステップサイズの変動を最小限に抑えるうえでお役に立てるように作成しました。初期設定時のほか、速度やステップサイズに変動が生じる場合には、こちらのアプリケーションノートをご利用いただくことをお勧めいたします。設定の変更方法の詳細については、各ステージやコントローラのマニュアルをご覧ください。
Click to Enlarge
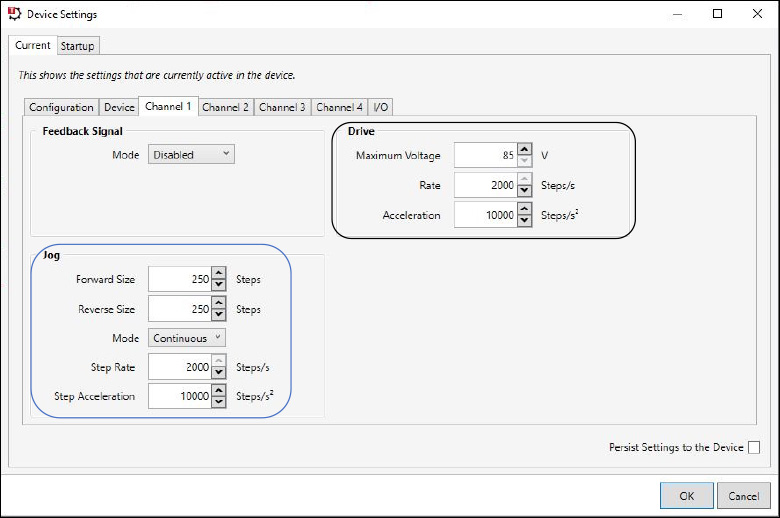
図2:ステージPD(R)シリーズには推奨されるチャンネル設定があります。設定はDevice Settings -> Current Device Settings-> Channel 1で変更できます。

Click to Enlarge
図1:ORICステージを制御する時には、ステージタイプをPD(R)に変更する必要があります。これはKinesis Softwareの Device Settings -> Startupで変更できます。

Click to Enlarge
図4:黒線で丸く囲まれているJogモードはContinuousに設定する必要があります。これはDevice Settings -> Current -> Channel 1で変更が可能です。

図3:黒線で囲まれた部分はデバイスGUIにあるジョグボタンです。
K-CubeコントローラとKinesisソフトウェアのコントロール
Kinesisソフトウェアのステージタイプの初期設定はPIAになっており、ORICステージには適用できません。そのため、初期設定を変更する必要があります。初期設定は、まずデバイスのGUIパネルのDevice Settingsにアクセスし、Startupタブをクリックします。ConfigurationタブでステージタイプをPD(R)に変更し、右下のPersist Settings to the Deviceのボックスにチェックを入れ、左下のSaveボタンをクリックします。それらの選択は図1に丸で示しています。これらの設定により、KinesisソフトウェアはPD(R)のステージタイプ用として使用できます。他のデバイスやチャンネルの設定も、このStartupで変更可能です。
ステージタイプPD(R)を用いて仕様の速度、速度変化、力を得るためには、特定のチャンネル設定を行うことを推奨します。これらの設定は図2に示すようにDevice SettingsのChannel 1のタブで変更できます。設定は黒線で囲まれたDriveボックス、および青線で囲まれたJogボックスで行います。
Driveボックスでは、Maximum Voltageを85 V、Rateを2000 steps/s、Accelerationを10000 Steps/s2に設定することを推奨します。Jogボックスでは、Forward Sizeを250 Steps、Reverse Sizeを250 Steps、ModeをContinuous、Step Rateを2000 Steps/s、Step Accelerationを10000 Steps/s2に設定することを推奨します。仕様性能を実現するには、ステージを平坦な面、当社が推奨する取付けプレート、または対応するアダプタープレートなどに適切に取り付けることが重要です。
1000 steps/sのStep Rateよりも速い連続ジョグは、図3の黒線で囲まれたデバイスGUIのJogボタンを使用したときにのみ可能です。K-CubeコントローラKIM101のジョイスティックまたはKIM001のホイールを使用したときの連続ジョグ動作は、1000 step/s以下に制限されます。ジョイスティックまたはホイールを使用するとき、シングルステップ動作あるいはカウントによる動作を行う場合は1000 step/sの制限はありません。
KinesisソフトウェアのJogモードをContinuousまたはSingleに変更したとき、図3の黒線で囲まれたKinesis GUIのJogボタンにのみ影響を与えます。コントローラKIM001またはKIM101の前面パネルのJoystickのモードは変更しません。KinesisソフトウェアのJogモード設定は、Device Settings -> Channel 1 -> Jogボックス -> Mode(図4参照)で行います。詳細については下記の前面パネルの制御装置のセクションでもご覧いただけます。

Click to Enlarge
図6:KinesisソフトウェアデバイスGUIのDevice SettingsにおけるDeviceタブ。Maximum Step Rate設定は青線で囲まれています。連続Jogモードでジョイスティックを使用する場合、設定は1000 steps/s未満でなければなりません。KinesisのJoystickモードは黒線で囲まれたドロップダウンメニューから選択できます。
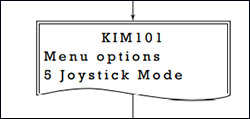
図5:K-CubeコントローラKIM101の前面パネルに表示されるオプション5のJoystickモード

Click to Enlarge
図8:KinesisソフトウェアのStep Size変更画面。Forward SizeおよびReverse Sizeの設定を変更します。またMode設定はGUIのJogボタンのコントロールにのみ影響し、Joystickモードには影響しません。

Click to Enlarge
図7:駆動速度はKinesisソフトウェアのDevice Settings -> Current -> Channel 1で変更できます。これは前面パネルにおけるメニューオプション3のSet Velocityに相当します。
KIMx01の前面パネルの制御装置とそれに関連する設定
前面パネルの制御メニューには10個のオプションがあります。K-CubeコントローラKIM101の2つのボタンとジョイスティック、またはK-CubeコントローラKIM001のボタンとホイールでアクセスできます。
オプション5のJoystickモード(図5参照)にはJog to Count、 Jogging in Steps、Velocity Controlの3つのモードがあります。KinesisソフトウェアのJoystickモードは前面パネルのオプション5、Joystickモードに関連しています。KinesisソフトウェアにおけるJoystickモードには、Step Rate、Jog、Goto Positionの3つのオプションがあります。この設定は図6に黒線で囲んで示されています。
Jog to Countモードでは、ステージをターゲットとするカウント(初期設定は0)の位置まで、前面パネルのオプション3のSet Velocityで設定された速度で移動させます。オプション3のSet Velocityでは、ステージがオプション5のJog to Countモードおよびオプション1のGoto Pos Countにおいて移動する速度を設定します。Kinesisソフトウェアでは、Device Settings -> Channel 1 -> Driveボックス -> Rateに相当する設定があります。これは図7でご覧いただけます。
Jogging in Stepsモードでは、オプション3のSet Velocityによってステージの速度は変わりません。このモードでの速度はKinesisソフトウェアで変更する必要があります。その設定はDevice Settings -> Channel 1-> Jogボックス ->Step Rateで変更できます。ステージの速度を上げようとするときに、Step Rateを変更する代わりにStep Sizeを変更することもできます。Step Sizeは、KIMコントローラの前面パネルでは、オプション4のJog Step Sizeで変更できます。Kinesisソフトウェアでは、Device Settings -> Channel 1 -> Jogボックス -> Forward SizeおよびReverse Sizeで変更できます(図8参照)。
オプション5のVelocity Controlモードではジョイスティックを使用して連続ジョグができますが、速度は1000 step/s未満でなければなりません。この速度は前面パネルのオプション3では変更できません。この速度はKinesisソフトウェアのDevice Settings -> Device -> Maximum Step Rateでのみ変更可能です(図6参照)。初期設定で10000という数値が表示される場合がありますが、この値はソフトウェアでは許容されません。数値を1~1000の間に変更する必要があります。
KinesisソフトウェアにおけるJoystickモードのStep Rateは、前面パネルのVelocity Controlモードに関連しており、Maximum Step Rateの設定にご使用いただけます。Direction Senseはジョイスティックまたはホイールを使用するときの移動方向の変更に使用できます。
| Posted Comments: | |
JHAO YING GUO
(posted 2024-06-18 16:32:47.677) I have a small question about this rotation stage. Can it move back and forth quickly? We need a stage that can rapidly oscillate with a frequency of about 1 kHz and a rotation angle of about 1 degree. Can this stage meet these requirements, or do you have other products you can recommend? Please feel free to contact me. Thank you. cdolbashian
(posted 2024-07-01 01:37:59.0) Thank you for your query. The maximum speed (continuous stepping) of PDR1C(/M) controlled by PDXC or PDXC2 is only 100°/s (typical). I have reached out to you directly to discuss your application. Yulong Dong
(posted 2024-02-02 10:49:26.207) Hi, I'm wondering, in the stick-slip motion of the piezo stage, what is the approximate timescale of the "stick" part and "slip" part in each step, respectively? During the "slip" part, would the stage stay still, or would it wobble or rotate back a little? cdolbashian
(posted 2024-02-16 09:37:59.0) Thank you for contacting Thorlabs. Unbalanced driving generates slow "stick" and fast "slip". The step time is dependent on the stage type, load and the drive voltage, and the fastest step time can be referred to the "Maximum Step Frequency" as shown in the "Specs" tab. In maximum step frequency of 20kHz, the timescale is in micro seconds. During the "slip" part, the piezo contracts quickly and the kinetic friction pulls the stage back a little. We have contacted you directly to discuss this. Oriol A.
(posted 2021-06-18 04:50:39.913) How well do they compare with the elliptec motors, in particular the ELL14? For discrete positioning of optical elements the ELL14 is sometimes not accurate enough, does this one have better resolution and repeatability? cdolbashian
(posted 2021-06-25 11:25:33.0) Thank you for contacting us at Thorlabs! What of resolution and repeatability are you looking for? What kind of limitations have you experienced with your ELL14? I have reached out to you with some more questions, and look forward to finding a suitable solution for your application! Xiao Wang
(posted 2021-04-21 20:00:45.52) Hi, the product page says that the piezo inertia drive is self-locking when the stage is at rest and no power is supplied to the piezo, but I find I can still rotate it manually without power supply. Is that normal??? YLohia
(posted 2021-04-22 10:58:36.0) Thank you for contacting Thorlabs. The PD1R stage has a holding torque of 25 mN•m. Considering its 34mm rotation plate diameter, a 0.73 N force tangent to the rim would move the plate. The holding torque is intended for locking the stage to make it impervious to vibrations from the setup or environment. Mark Saffman
(posted 2020-07-18 16:37:55.52) A question about the PDR1. The product page says the stages emit a high pitched noise and generate heat when they rotate. DO the stages cause vibration when rotating? I am concerned about vibrations affecting laser locks. YLohia
(posted 2020-07-21 10:21:56.0) Thank you for contacting Thorlabs. PDR1 utilizes a piezoelectric inertia drive that is driven by signals of frequencies up to 2 kHz. These frequencies are audible to humans as high pitch noise. The influence of this 2 kHz vibration is much smaller than the overall wobble of the device. |
回転マウント&回転ステージのセレクションガイド
当社では手動式および電動式の回転マウントと回転ステージを豊富にご用意しております。回転マウントの内孔はØ12 mm~Ø12.7 mm(Ø1/2インチ)、Ø25 mm~Ø25.4 mm(Ø1インチ)、またはØ50 mm~Ø50.8 mm(Ø2インチ) の光学素子取付け用に設計されております*。また回転ステージには、様々な部品やシステムが取り付けられるようにタップ穴が配置されております。電動式は、DCサーボモータ、2相ステッピングモータ、あるいはElliptec™共振ピエゾモータにより駆動されます。いずれも360°の連続回転が可能です。
*下表のマウントは、Ø12.7 mm、Ø25.4 mm、Ø50.8 mmの光学素子に対して最適設計されています。Ø12.0 mm、Ø25.0 mm、Ø50.0 mmなどの少し小さい光学素子に対してもご使用いただけますが、光学素子の偏心が重要ではない用途でのご使用をお勧めします。
手動回転マウント
| Rotation Mounts for Ø1/2" Optics | |||||||
|---|---|---|---|---|---|---|---|
| Item # | MRM05(/M) | RSP05(/M) | CRM05 | PRM05(/M)a | SRM05 | KS05RS | CT104 |
| Click Photo to Enlarge |  |  |  |  |  |  |  |
| Features | Mini Series | Standard | External SM1 (1.035"-40) Threads | Micrometer | 16 mm Cage-Compatible | ±4° Kinematic Tip/Tilt Adjustment Plus Rotation | Compatible with 30 mm Cage Translation Stages and 1/4" Translation Stagesb |
| Additional Details | |||||||
| Rotation Mounts for Ø1" Optics | ||||||||
|---|---|---|---|---|---|---|---|---|
| Item # | RSP1(/M) | LRM1 | RSP1D(/M) | DLM1(/M) | CLR1(/M) | RSP1X15(/M) | RSP1X225(/M) | PRM1(/M)a |
| Click Photo to Enlarge |  |  |  |  |  |  | |  |
| Features | Standard | External SM1 (1.035"-40) Threads | Adjustable Zero | Two Independently Rotating Carriages | Rotates Optic Within Fixed Lens Tube System | Continuous 360° Rotation or 15° Increments | Continuous 360° Rotation or 22.5° Increments | Micrometer |
| Additional Details | ||||||||
| Rotation Mounts for Ø1" Optics | ||||||
|---|---|---|---|---|---|---|
| Item # | LM1-A & LM1-B(/M) | CRM1T(/M) | CRM1LT(/M) | CRM1PT(/M) | KS1RS | K6XS |
| Click Photo to Enlarge |   |  |  |  |  |  |
| Features | Optic Carriage Rotates Within Mounting Ring | 30 mm Cage-Compatiblea | 30 mm Cage-Compatible for Thick Opticsa | 30 mm Cage-Compatible with Micrometera | ±4° Kinematic Tip/Tilt Adjustment Plus Rotation | Six-Axis Kinematic Mounta |
| Additional Details | ||||||
| Rotation Mounts for Ø2" Optics | |||||||
|---|---|---|---|---|---|---|---|
| Item # | RSP2(/M) | RSP2D(/M) | PRM2(/M) | LM2-A & LM2-B(/M) | LCRM2A(/M) | KS2RS | K6X2 |
| Click Photo to Enlarge |  |  |  |   |  |  |  |
| Features | Standard | Adjustable Zero | Micrometer | Optic Carriage Rotates Within Mounting Ring | 60 mm Cage-Compatible | ±4° Kinematic Tip/Tilt Adjustment Plus Rotation | Six-Axis Kinematic Mount |
| Additional Details | |||||||
| Rotation Drive Mechanism and Adjustment Range | Manual, 360° Continuous | Coarse: Manual, 360° Continuous; Fine: ±7° Micrometer | Manual, 360° Continuous | ||||
| Optic Mounting | Internally SM2-Threaded Carriage | Internal SM2 Threads in LM2-A | Internally SM2-Threaded Carriage | ||||
| Maximum Accepted Optic Thickness | 0.51" (13 mm) | 0.54" (13.7 mm) | 0.48" (12.2 mm) | 0.46" (11.7 mm) | 0.52" (13.2 mm) | 0.47" (12 mm) | 0.53" (13.4 mm) |
| Post Mounting | 8-32 (M4) Tap | 8-32 (M4) Tap in LM2-B | 8-32 (M4) Tap | Four Counterbores for 8-32 (M4) Cap Screws | Six Counterbores for 8-32 (M4) Cap Screws | ||
| Cage System Compatibility | N/A | Four 4-40 (M3) Taps on Rotation Dial with 60 mm Spacing | N/A | Four Bores for Ø6 mm Cage Rods with 60 mm Spacing | N/A | N/A | |
手動回転ステージ
| Manual Rotation Stages | ||||||
|---|---|---|---|---|---|---|
| Item # | RP005(/M) | PR005(/M) | MSRP01(/M) | RP01(/M) | RP03(/M) | QRP02(/M) |
| Click Photo to Enlarge |  |  |  |  |  |  |
| Features | Standard | Two Hard Stops | ||||
| Additional Details | ||||||
| Manual Rotation Stages | ||||||
|---|---|---|---|---|---|---|
| Item # | XRNR1(/M) | XRR1(/M) | PR01(/M) | CR1(/M) | XYR1(/M) | OCT-XYR1(/M) |
| Click Photo to Enlarge |  |  |  |  |  |  |
| Features | Fine Rotation Adjuster and 2" Wide Dovetail Quick Connect | Fine Rotation Adjuster and 3" Wide Dovetail Quick Connect | Fine Rotation Adjuster and SM1-Threaded Central Aperture | Fine Pitch Worm Gear | Rotation and 1/2" Linear XY Translation | |
| Additional Details | ||||||
電動回転マウント&ステージ
| Motorized Rotation Mounts and Stages with Central Clear Apertures | |||||
|---|---|---|---|---|---|
| Item # | DDR25(/M) | PDR1C(/M) | PDR1(/M) | PDR1V(/M) | PDXR1(/M) |
| Click Photo to Enlarge |  |  |  |  |  |
| Features | Compatible with SM05 Lens Tubes, 16 mm Cage System, & 30 mm Cage System | Compatible with 16 mm Cage System | Compatible with SM05 Lens Tubes & 30 mm Cage System | Vacuum-Compatible; Also Compatible with SM05 Lens Tubes & 30 mm Cage System | Compatible with SM05 Lens Tubes & 30 mm Cage System |
| Additional Details | |||||
| Motorized Rotation Mounts and Stages with Central Clear Apertures | |||||
|---|---|---|---|---|---|
| Item # | K10CR1(/M) | PRM1Z8(/M)a | DDR100(/M) | ELL14 | HDR50(/M) |
| Click Photo to Enlarge |  |  |  |  |  |
| Features | Compatible with SM1 Lens Tubes & 30 mm Cage System | Compatible with SM1 Lens Tubes, 16 mm Cage System, 30 mm Cage System | Compatible with SM1 Lens Tubes, Open Frame Design for OEM Applications | Compatible with SM2 Lens Tubes | |
| Additional Details | |||||
| Motorized Rotation Mounts and Stages with Tapped Platforms | ||
|---|---|---|
| Item # | PRMTZ8(/M)a | ELL18(/M)b |
| Click Photo to Enlarge |  |  |
| Features | Tapped Mounting Platform for Mounting Prisms or Other Optics | Tapped Mounting Platform, Open Frame Design for OEM Applications |
| Additional Details | ||

 ズーム
ズーム
含まれるコンポーネント:
- 回転ステージ、SMCコネクタ(メス型)の接続された本体一体型ケーブル付き
- 長さ4 mmのM2 x 0.4キャップスクリュ 2本
- Ø2 mm位置決めピン 2本
- コントローラPDXCまたはPDXC2を使用して駆動した場合、最大速度100°/sで360°連続回転が可能
- ステップサイズ(典型値): 30 µrad(コントローラPDXCまたはPDXC2での駆動時)
- プラットフォームのサイズ: Ø28.0 mm
- プラットフォームの高さ: 18.0 mm
- コンパクトな設置面積: 30.0 mm x 30.0 mm
- SMCメス型コネクタの接続された長さ1 mのケーブル付き
- ピエゾコントローラPDXC、PDXC2、KIM001またはKIM101が別途必要(下記参照)
こちらの開ループ式ピエゾ慣性アクチュエータ付き小型回転ステージORIC®は、コントローラPDXCまたはPDXC2を使用した場合、最大速度100°/s、典型的なステップサイズ30 µradで、バックラッシュのない動作が可能です。コントローラKIM001またはKIM101を使用した場合は、その最大速度は30°/s、典型的なステップサイズは150 µradになります。また、ステージが停止してピエゾ素子に電源が供給されていない時には、ピエゾ慣性アクチュエータは自動的に固定されます。これらの特徴により、ミリラジアン以下の分解能とアライメントの長期安定性が要求される場合には、ステージPDR1C/Mはその位置決め・保持用として適しています。
取付け方法
ステージPDR1C/Mは垂直方向にも水平方向にも取り付け可能です。また、ステージの3か所の側面にはØ12 mmおよびØ12.7 mmポスト取り付け用のM4 x 0.7タップ穴が1つずつあります。ステージをØ12 mmまたはØ12.7 mmポストに取り付ける場合は、これらのタップ穴の深さ(3.5 mm)を超えないために、止めネジSS4MS10のご使用をお勧めしています。ステージの対角位置の2つのコーナーにはそれぞれM2用の取付けスロットがあり、それらを用いて平坦な面(推奨平面度≤5 μm)に取り付けることができます。また20 mm直線移動ステージORICに取り付けて、XY + 回転ステージを構築することもできます。
回転する上部プレートには4つのM4 x 0.7ネジ穴と、16 mmケージシステム用の4つの#4-40ネジ穴があります。また、その中央にはM6 x 1.0の貫通穴(有効開口径Ø4.9 mm)があり、オプトメカニクスを取り付けたりするほか、光がステージ本体を通過するための光路としてもご利用いただけます。
対応アクセサリ
アダプタープレートPD1B/M、PD1B2/M、PD1U/M、PD1B3/Mには、ステージPDR1C/Mを取り付けるための平坦な面があり、それぞれのプレートは独自の取付け機能を有します。アダプタープレートPD1T/MはステージPDR1C/Mの下側に取り付けることができ、中央にはポスト取付け用のM4 x 0.7タップ穴があります。直角ブラケットPD1Z/Mを用いてステージPDR1C(/M) を取り付けると、XY+θY回転ステージを構築できます。
各ステージには1.0 mのケーブルが付いていますが、1.5 mのSMCエクステンションケーブルPAA101およびオス-オス型のSMCアダプタT5026を用いて、ケーブルを延長することもできます。ケーブルの静電容量のため、制御ケーブルの全長は2.5 mを超えないようにご注意ください。
必要なコントローラ
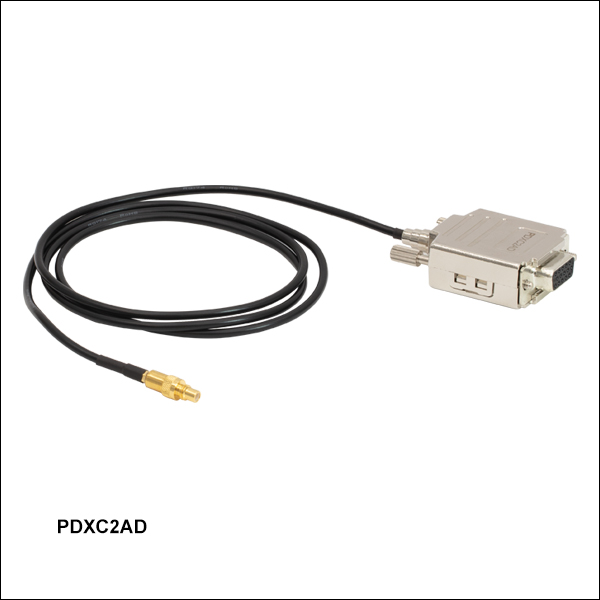
こちらのステージを駆動するには、下記のピエゾ慣性ステージ用コントローラPDXC、ピエゾ慣性ステージ用小型コントローラPDXC2、シングルチャンネルK-Cube™ピエゾ慣性モーターコントローラKIM001、または4チャンネルK-Cubeピエゾ慣性モーターコントローラ KIM101の何れかが必要です。このステージにコントローラPDXC2を使用するには、Dサブ(メス)-SMC(オス)アダプターケーブルPDXC2ADが必要です。標準的なピエゾコントローラでは、ピエゾ慣性アクチュエータを駆動することはできません。コントローラKIM101のバージョンは2019年以降、ファームウェアは010004以上がインストールされていなければなりません。それ以前のバージョンのコントローラや古いファームウェアでは適切に機能せず、またステージやコントローラの故障につながる場合があります。旧世代のコントローラTIM101は対応していません。このステージの仕様値は、ベンチトップ型コントローラPDXC、PDXC2またはK-Cube コントローラKIM101を使用して測定した値です。コントローラKIM001でもKIM101と同様の性能が得られます。PDXCまたはPDXC2はK-Cubeコントローラに比べるとより高い周波数で動作しますが、その最大出力電圧は低くなります。そのため、ステージPDR1C/Mをより小さなステップサイズで高速に駆動することができますが、そのトルクは小さくなります。
注:動作中のステージではハイピッチのノイズが発生し、またある程度の熱が発生する場合があります。これはデバイスの正常な動作状態であり、故障ではありません。

 ズーム
ズーム

Click to Enlarge
2台の20mm直線移動ステージ PD1(/M) の上に、回転ステージPDR1(/M)を取り付けて、XY + 回転ステージを構築。ステージPD1/Mの底面をベースUBP2/Mに取り付けるには、長さ8 mmのM4 x 0.7ネジが2本必要です。

Click to Enlarge
回転ステージPDR1(/M)の上に、付属のアクセサリを使用して2台の直線移動ステージ PD1(/M)を取り付け、XY + 回転ステージを構築。この構成では、ステージPD1(/M)から出ているケーブルによって回転が制限されますのでご注意ください。
- 最大速度20°/sで360°連続回転が可能
- ステップサイズ(典型値):250 µrad
- プラットフォームのサイズ:Ø34.0 mm
- プラットフォームの高さ:18.0 mm
- コンパクトな設置面積:40.0 mm x 40.0 mm
- SMCメス型コネクタの接続された長さ1 mのケーブル付き
- ピエゾコントローラKIM001またはKIM101が別途必要(下記参照)
こちらの開ループ式ピエゾ慣性アクチュエータ付き回転ステージORIC®は、最大速度20°/sでバックラッシュのない動作が可能で、その典型的なステップサイズは250 µradです。また、ステージが停止してピエゾ素子に電源が供給されていない時には、ピエゾ慣性アクチュエータは自動的に固定されます。これらの特徴により、ミリラジアン以下の分解能とアライメントの長期安定性が要求される場合には、ステージPDR1/Mはその位置決め・保持用として適しています。
取付け方法
ステージPDR1/Mは垂直方向にも水平方向にも取り付け可能です。また、回転ステージの四隅のØ6 mm貫通穴にはERシリーズケージロッドを取付けられるため、30 mmケージシステムへの組込み、アダプタープレートPD3T/Mを用いた50 mm直線移動ステージORICへの取付け、あるいは汎用取付けアダプタPD1B3/M(下記参照)を用いたブレッドボードへの取付けなどが可能です。ロッドは2.0 mmの六角止めネジで固定できます。さらに、ステージの2か所の側面にはØ12 mmおよびØ12.7 mmポスト取り付け用のM4 x 0.7タップ穴が1つずつあります。
ステージの底面にはM4 x 0.7タップ穴が25.0 mm間隔で2つあり、これらを用いて平坦な面に取り付けることができます。またXY + 回転ステージを構築する際に、これらのタップ穴を用いて20 mm直線移動ステージORIC上に取り付けることもできます。これらの穴を用いてステージを取り付ける場合、取付け面の平面度は20 µm以下であることが必要です。
回転する上部プレートにはM4 x 0.7タップ穴が4つとØ2 mm位置決めピン用の穴が4つあり、コンポーネントやORICシリーズの直線移動ステージなどの取り付けに利用できます。当社では交換用の位置決めピン(20個セット)もご用意しております(下記参照)。ステージの中心にはØ9 mmの貫通穴があり、その上部プレート部分にはSM05内ネジが付いています。この貫通穴は、光がステージ本体を通過するための光路としてご利用いただくことができます。
対応アクセサリ
アダプタープレートUBP2/Mには、中央のM6用スロットのほかに30 mmケージシステム用の#4-40タップ穴が4個あり、また複数の取付け穴も付いています。アダプタープレートPD1U/Mを使用すると、回転ステージPDR1/Mを直線移動ステージPD1/M上に簡単に取り付けることができます。
各ステージには1.0 mのケーブルが付いていますが、1.5 mのSMCエクステンションケーブルPAA101およびオス-オス型のSMCアダプタT5026を用いて、ケーブルを延長することもできます。ケーブルの静電容量のため、制御ケーブルの全長は2.5 mを超えないようにご注意ください。
含まれるコンポーネント:
- 回転ステージ、SMCコネクタ(メス型)の接続された本体一体型ケーブル付き
- 長さ5.3 mmのM4 x 0.7キャップスクリュ 2本
- Ø2 mm位置決めピン 2本
必要なコントローラ
これらのステージを駆動するには、シングルチャンネルのK-Cube™ピエゾ慣性モーターコントローラKIM001、4チャンネルのK-Cubeピエゾ慣性モーターコントローラKIM101が別途必要です(下記参照)。標準的なピエゾコントローラでは、ピエゾ慣性アクチュエータを駆動することはできません。コントローラKIM101のバージョンは2019年以降、ファームウェアは010004以上がインストールされていなければなりません。それ以前のバージョンのコントローラや古いファームウェアでは適切に機能せず、またステージやコントローラの故障につながる場合があります。旧世代のコントローラTIM101は対応していません。このステージの仕様値は、K-Cube コントローラKIM101を使用して測定した値です。コントローラKIM001でも同様の性能が得られます。
注:動作中のステージではハイピッチのノイズが発生し、またある程度の熱が発生する場合があります。これはデバイスの正常な動作状態であり、故障ではありません。

 ズーム
ズーム
含まれるコンポーネント:
- 回転ステージ、SMCコネクタ(メス型)の接続された本体一体型ケーブル付き
- 長さ5.3 mmのM4 x 0.7キャップスクリュ 2本
- Ø2 mm位置決めピン 2本
- 10-6 Torrまでの真空に対応
- 最大速度20°/sで360°連続回転が可能
- ステップサイズ(典型値):250 µrad
- プラットフォームのサイズ:Ø34.0 mm
- プラットフォームの高さ:18.0 mm
- コンパクトな設置面積:40.0 mm x 40.0 mm
- 長さ0.75 mのリード線付き
- 長さ1.0 mのリード線の付いたSMC端子も付属
- ピエゾコントローラKIM001またはKIM101が別途必要(下記参照)
こちらの開ループ式ピエゾ慣性アクチュエータ付き回転ステージORIC®は、最大速度20°/sでバックラッシュのない動作が可能で、その典型的なステップサイズは250 µradです。また、ステージが停止してピエゾ素子に電源が供給されていない時には、ピエゾ慣性アクチュエータは自動的に固定されます。これらの特徴によりステージPDR1V/Mは、ミリラジアン以下の分解能とアライメントの長期安定性が要求される場合の位置決め・保持用として適しています。
こちらのステージは10-6 Torrまでの真空に対応します。ユニットやアダプタープレートを真空チャンバに設置する前には、すべてのコンポーネントをプリベークし、真空状態に影響を及ぼす可能性のある揮発性化合物や水分を取り除くことをお勧めいたします。プリベーク温度は120 °C以下に制限する必要があります。このステージには真空対応のリード線(長さ0.75 m)が付いており、これでアクチュエータを真空チャンバのバルクヘッドに接続することができます。リード線はPTFEコーティングされたAWG 30ケーブルで、赤のリード線はプラス極、白のリード線はマイナス極です。SMCコネクタ付きの長さ1.0 mの2芯ケーブルも付属しています。
取付け方法
ステージPDR1V/Mは垂直方向にも水平方向にも取り付け可能です。また、回転ステージの四隅のØ6 mm貫通穴にはERシリーズケージロッドを取付けられるため、30 mmケージシステムへの組込み、アダプタープレートPD3T/Mを用いた50 mm直線移動ステージORICへの取付け、あるいは汎用取付けアダプタPD1B3/M(下記参照)を用いたブレッドボードへの取付けなどが可能です。ロッドは2.0 mmの六角止めネジで固定できます。さらに、ステージの2か所の側面にはØ12 mmおよびØ12.7 mmポスト取り付け用のM4 x 0.7タップ穴が1つずつあります。
ステージの底面にはM4 x 0.7タップ穴が25.0 mm間隔で2つあり、これらを用いて平坦な面に取り付けることができます。またXY + 回転ステージを構築する際に、これらのタップ穴を用いて20 mm直線移動ステージORIC上に取り付けることもできます。これらの穴を用いてステージに取り付ける場合、取付け面の平面度は20 µm以下であることが必要です。
回転する上部プレートにはM4 x 0.7タップ穴が4つとØ2 mm位置決めピン用の穴が4つあり、コンポーネントやORICシリーズの直線移動ステージなどの取り付けに利用できます。当社では交換用の位置決めピン(20個セット)もご用意しております(下記参照)。ステージの中心にはØ9 mmの貫通穴があり、その上部プレート部分にはSM05内ネジが付いています。この貫通穴は光がステージ本体を通過するための光路としてご利用いただけます。
必要なコントローラ
これらのステージを操作するには、シングルチャンネルのK-Cube™ピエゾ慣性モーターコントローラKIM001、4チャンネルのK-Cubeピエゾ慣性モーターコントローラKIM101(下記参照)が別途必要です。標準的なピエゾコントローラでは、ピエゾ慣性アクチュエータを駆動することはできません。コントローラKIM101のバージョンは2019年以降、ファームウェアは010004以上がインストールされていなければなりません。それ以前のバージョンのコントローラや古いファームウェアでは適切に機能せず、またステージやコントローラの故障につながる場合があります。旧世代のコントローラTIM101は対応していません。このステージの仕様値は、K-CubeコントローラKIM101を使用して測定した値です。コントローラKIM001でも同様の性能が得られます。
注:動作中のステージではハイピッチのノイズが発生し、またある程度の熱が発生する場合があります。これはデバイスの正常な動作状態であり、故障ではありません。

 ズーム
ズーム
含まれるコンポーネント:
- 回転ステージ(ケーブル付き)、Dサブコネクタ(メス型)
- 長さ16 mmのM4 x 0.7キャップスクリュ 2本
- 長さ8 mmのM4 x 0.7キャップスクリュ 2本
- 長さ5.3 mmのM4 x 0.7キャップスクリュ 2本
- 長さ6 mmのM2 x 0.4キャップスクリュ 2本
- 長さ2 mmのM2 x 0.4キャップスクリュ 2本
- Ø2 mm位置決めピン 2本
- 開ループおよび閉ループでの動作が可能
- 光学式エンコーダによる最高分解能:0.4365 µrad(0.09 arcsec)
- 最大速度30°/sで360°連続回転が可能
- プラットフォームのサイズ: Ø49.7 mm
- プラットフォームの高さ: 23.0 mm
- コンパクトな設置面積: 56.0 mm x 56.0 mm
- D-Subメス型コネクタが接続された長さ1.5 mのケーブル付き
- ピエゾ慣性アクチュエータ用コントローラPDXCまたはPDXC2が別途必要(下記参照)
- 各ステージは個別に試験され、試験データ証明書とともに発送されます。
この光学式エンコーダ付きピエゾステージORIC® PDXR1/Mは、開ループおよび閉ループのどちらのモードでも使用することができます。最大許容負荷は1 kgで、最大速度30°/sでバックラッシュのない動作が可能です。ピエゾ慣性アクチュエータは、ステージが停止していてピエゾ素子に電源が供給されていない時には自動的にロックされるため、ミリラジアンよりも小さな分解能とアライメントの長期保持を共に要求される用途に適しています。仕様の詳細は「仕様」タブをご参照ください。
取付け方法
ステージPDXR1/Mは垂直方向にも水平方向にも取り付け可能です。対角位置のコーナーに1つずつあるM4用のザグリ穴により、ブレッドボードMSB7510/Mのほか、M4 x 0.7タップ穴付きのØ12 mmまたはØ12.7 mmポスト、あるいはØ25 mmポストに取付け可能です。ステージの下側のもう一方の対角位置のコーナーに、それぞれ取付け用のM4 x 0.7タップ穴があります。また、ステージの1つの側面にはØ12 mmまたはØ12.7 mmポストに取付けるためのM4 x 0.7タップ穴があります。最適な性能を得るためには、ステージを平面度≤5 µmの面に取付け、コーナーのネジを0.55 N•mで締め付けてください。取付けアダプタPD1B3/M(下記参照)を用いると、湾曲のない精密な平面度の取付け面が得られます。穴間隔が高密度なブレットボードや光学テーブルなど、平面度> 5 µmの表面にネジアダプタを用いてステージを取付ける場合、推奨するトルクは0.3 N•mです。
回転する上部プレートには、M4 x 0.7タップ穴、M2 x 0.4タップ穴、およびØ2 mm位置決めピン用穴がそれぞれ4つずつあり、これらはコンポーネントやORIC直線移動ステージなどの取り付けに利用できます。当社では交換用の位置決めピン(20個セット)もご用意しております(下記参照)。ステージは4つの#4-40ネジ穴を用いて30 mmケージシステムに取付けられます。また、ステージの中心にはØ9 mmの貫通穴があり、その上部プレート部分にはSM05内ネジが付いています。この貫通穴は光がステージ本体を通過するための光路としても利用できます。

Click to Enlarge
回転ステージPDXR1/M、アダプタープレートPD1T/M付き
対応アクセサリ
アダプタープレートPD1T/Mには、中央にM4タップ穴が1個、周囲に取付け用のM2 x 0.4タップ穴が10個、M3 x 0.5タップ穴が4個、および16 mmケージシステム用に配置された#4-40タップ穴が4個あります。
アダプタープレートPD1U/Mには8個のM4タップ穴が十字型に配置されています。底面にはM4用ザグリ穴が5個付いています。
各ステージには1.5 mのケーブルが付いています。ケーブルの延長には長さ3 mでDサブコネクタ付きのPDXCEがご使用いただけます。ケーブルの静電容量のため、制御ケーブルの全長は4.5 mを超えないようにご注意ください。
必要なコントローラ
ステージPDXR1MにはコントローラPDXCとPDXC2のみが対応しております。こちらのページに掲載されているKIM001およびKIM101は対応しておりませんのでご注意ください。
注: 動作中のステージではハイピッチのノイズが発生し、またある程度の熱が発生する場合があります。これはデバイスの正常な動作状態であり、故障ではありません。

 ズーム
ズーム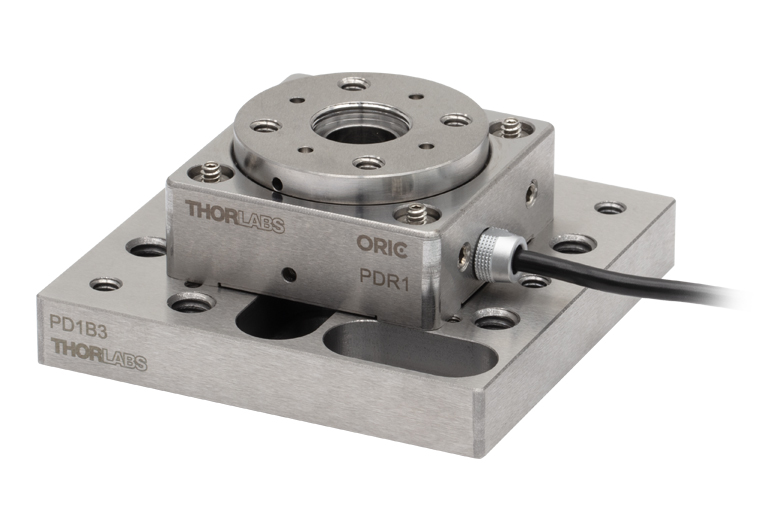
Click to Enlarge
アダプタPD1B3(/M)に取り付けられたステージPDXR1(/M)
Click for Details
アダプタープレートPD1B3(/M)の外形図。各取付け穴(A~H)の説明は左表をご覧ください。 ミリ規格のアダプタープレートの寸法は括弧内に記載されています。
- ORICシリーズステージの取付けに必要なフラットな面を提供
- 不動態化処理されたステンレススチール製
- テーブルやブレッドボードへの取付け時のステージの歪みを抑制
- 寸法 (L x W x H):65 mm x 65 mm x 10 mm
汎用アダプタープレートPD1B3/Mは、ORICシリーズのすべてのピエゾ慣性ステージに対して、取付ける際に必要なフラットな面(平面度≤5 µm)を提供します。右の外形図の取付け穴(A~H)の詳細は下の表に示します。4つの#4-40ネジ穴を用いて30 mmケージシステムに取付けることができ、またブレッドボードに取付けるための2本のM6ネジが付属しています。
ステージを平面度が5 µmよりも大きな面に取り付けた場合(多くのブレッドボードや光学テーブルに当てはまります)、ステージが歪曲することでステージの速度変動やピッチ・ヨーの性能に影響が現れることがあります。平面度が十分でないテーブルやブレッドボードに取り付けるときには、ステージをこれらの取付けアダプタに取り付けることで、そのような歪曲を大幅に低減することができます。
| Labela | Holes/Slots Patternb | Spacingb (Stage Compatibility) | Threading Depth | Places |
|---|---|---|---|---|
| A | 1/4"-20 (M6) | 1" x 2" (25 x 50 mm) | Through | 6 |
| B | Ø2 mm Dowel Pin Holes | 16 x 16 mm | 1.5 mm | 4 |
| C | #4-40 | 30 x 30 mm (Item # PDR1(/M), PDR1V(/M)) | 3.5 mm | 4 |
| D | 1/4"-20 (M6) C-Slot | 1" to 2" (25 to 50 mm) | N/A | 4 |
| E | #00-90 (M1.2) | 10 x 10 mm (Item # PD2(/M), PDX2(/M)) | 3.0 mm | 4 |
| F | #8-32 (M4) C-Slot | 1.25" (31.25 mm) | N/A | 1 |
| G | #2-56 (M2) | 27.0 x 23.4 mm (Item # PDXZ1(/M), PD1(/M), PDX1(/M), PD1D(/M), PD1V(/M), PDR1C(/M)) / 40.8 x 30 mm | 7 mm | 8 |
| H | #8-32 (M4) | 2" (50 mm) (Item # PD3(/M)) / 2" x 2" (50 x 50 mm) (Item # PDXR1(/M)) | 7.8 mm | 4 |

 ズーム
ズーム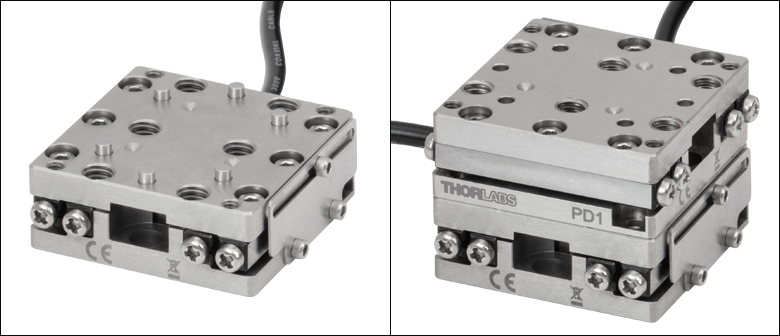
Click for Details
上のステージPD1の写真に示すように、位置決めピンPD1P1はほとんどのORIC®ステージの取付け穴に適合します。
- Ø2 mm、長さ3 mmの位置決めピン
- 耐食性のあるステンレススチール製
- 20個セットでご用意
位置決めピンPD1P1の寸法は、直径2 mm、長さ3 mmです。この製品は、当社のORIC®ステージ(4.5 mm垂直移動ステージ、20 mmおよび50 mm直線移動ステージ、回転ステージ、真空対応ステージ)に付属する位置決めピンの交換用としてご使用いただけます。ステンレススチール製で耐食性があります。
20個セットでご用意しております。

 ズーム
ズーム| Key Specificationsa | ||
|---|---|---|
| SMC Port | Number of Ports | Two |
| Voltage | 0 to 40 V | |
| Frequency | 20 kHz Max | |
| D-Sub Port | Number of Ports | One |
| Voltage | -10 to 50 V | |
| Frequency | 20 kHz Max | |
| Max Current Limit | 10 A | |
| Front USB | Type A, USB Host 2.0 | |
| Back USB | Type B, USB Device 2.0 | |
| Voltage of Analog In/Out | -10 to 10 V, ±2% | |
| Voltage of Trigger In/Out | 0 to 5 V, TTL | |
| Input Power | 100 - 240 VAC, 50 - 60 Hz | |
- 詳細な仕様については下の赤いアイコン(
 )をクリックしてマニュアルをご覧ください。
)をクリックしてマニュアルをご覧ください。
- PDシリーズピエゾ慣性アクチュエータ付き直線移動ステージ、垂直移動ステージPDXZ1/M、および回転ステージPDR1C/MとPDXR1/M用コントローラ
- 開ループおよび閉ループの両動作をサポート
- SMCおよび15ピンDサブポートが使用可能
こちらのコントローラは、当社のピエゾ慣性アクチュエータ付きの直線移動ステージ、垂直移動ステージPDXZ1/M、そして回転ステージPDR1C/Mの制御用として設計されています。開ループステージ制御用のSMC出力端子が2チャンネル、開ループまたは閉ループステージ制御用の15ピンDサブ出力ポートが1チャンネル付いています。Dサブコネクタ付きのORICシリーズステージを使用するうえで延長ケーブルが必要な場合には、PDXCEをご使用いただけます(別売り、下記参照)。
組込まれたソフトウェアにより、フロントパネルのボタン、LCDディスプレイ、およびノブを使用して、このユニットをフル制御できます。また、組込みの外部トリガーモードはシングルチャンネル動作をサポートしています。複数のコントローラを接続することで、Dサブモードでラスタ走査のようなマルチチャンネル動作が可能です。ユーザは、PCに接続しなくても、出力ポートの選択、開ループ/閉ループのモード切り替え、ホーミングやエンコーダの校正などを行うことができます。ユニット上での制御のほかに、USB接続を利用してソフトウェアのプラットフォームで簡単にPC制御を行うこともできます。
ユニットには日本国内用の電源コードが付属します。すべての用途において、お手持ちの電源ソケットに適したプラグの付いた、IEC320準拠の電源コードをご使用ください。また、背面パネルに記載された定格電源電圧が、日本国内の電源に合致していることをご確認ください。
詳細については、製品紹介ページをご参照ください。

 ズーム
ズーム| Key Specificationsa | ||
|---|---|---|
| Performance Specificationsa | ||
| D-sub Port | Number of Ports | One |
| Voltage | 0 to 56 V | |
| Frequency | 20 kHz Max | |
| Max Current Limit | 10 A | |
| Front USB | Type A, USB HID Host | |
| Back USB | Type B, USB Device 2.0 | |
| I/O Port | Voltage of Analog In/Out | -10 to 10 V, ±2% |
| Voltage of Trigger In/Out | 0 to 5 V, TTL | |
| Ethernet PC Communication | One RJ-45 Port | |
| Dimensions (L x W x H) | 115.2 mm x 150.0 mm x 48.5 mm (4.54” x 5.91” x 1.91”) | |
| Weight | 0.53 kg | |
| Input Power | 12 V, 3 A DAC | |
- 詳細な仕様は下の赤いアイコン()をクリックしてマニュアルをご覧ください。
- ORICシリーズのピエゾ慣性アクチュエータ付き直線移動ステージ、垂直移動ステージPDXZ1/M、および回転ステージPDR1C/MとPDXR1/M用コントローラ
- コンパクトな設計、ソフトウェアKinesis®による制御
- 開ループおよび閉ループの両動作をサポート
- エネルギー効率の高いスイッチングアンプ回路によりピーク出力電流10 Aを実現
- 設定可能な高速通信インターフェイス:USB 2.0、ギガビットイーサネット、デジタルI/0、アナログI/0
- パルスレートの範囲:800 Hz~20 kHz
小型コントローラPDXC2 は、当社のピエゾ慣性アクチュエータで動作するORICシリーズの直線移動ステージ、垂直移動ステージPDXZ1/M、回転ステージPDR1/MおよびPDXR1/Mの制御用として設計されています。1チャンネルの開ループまたは閉ループのステージを制御できるポート(15ピンDサブ)が付いています。Dサブ-SMCアダプターケーブルPDXC2AD(下記参照)を使用すると、SMCコネクタを有するステージに接続して開ループ動作での操作ができます。
コントローラPDXC2は、背面パネルのUSBポートまたはイーサネットポートからPCに接続できます。開ループと閉ループのモード切替え、ホーミング動作の実行、パラメータの最適化等の動作パラメータとシステム操作のすべては、Kinesis®ソフトウェア(上の「Kinesisソフトウェア」タブからダウンロードできます)を搭載したPCで制御できます。トリガーモードや移動パラメータなどを設定することで、ラスター走査といった動作を構成することができます。ORICシリーズの特定のエンコーダ付きステージ(型番PDX1/MとPDXR1/Mのみ)はモーションコントロールソフトウェアページ内のPDXC2 Calibration Toolを用いて校正できます。詳細はマニュアルをご覧ください。コマンドライン制御もUSBとRS-232のポートを用いて実行できます。
PDXC2は付属の12 VDC電源DS12 (入力電圧100~240 VAC、国内用AC電源ケーブル付属)で電源供給されます。 すべての用途において、お使いの電源ソケットに適したプラグの付いた、IEC320準拠の電源コードをご使用ください。また、背面パネルに記載された定格電源電圧が、日本国内の電源に合致していることをご確認ください。
詳細は製品紹介ページをご参照ください。
")
 ズーム
ズーム
Click for Details
DB15メス-SMCオス
アダプターケーブルPDXC2ADには、15ピンDサブメスコネクタと、SMCオスコネクタが付いています。ケーブルがコントローラPDXC2の15ピンDサブポート(オス)と、20 mm ステージPD1/M、PD1D/M、PD1V/Mまたは、回転ステージPDR1C/MのSMCコネクタを接続します。

 ズーム
ズーム
Click to Enlarge
DB15オス-DB15メス

- ピエゾステージPDXZ1/M、PD2/M、PDX2/M、PDX1/M、PD3/MまたはPDXR1/Mのオス型Dサブコネクタとピエゾ慣性ステージ用コントローラPDXCまたはPDXC2の接続
- 長さ3 mの延長用ケーブル
延長ケーブルPDXCEは、ピエゾ慣性ステージ用コントローラPDXCまたはPDXC2と、ピエゾ慣性垂直移動ステージPDXZ1/M(移動慮4,5 mm)、直線移動ステージPD2/M(移動量5 mm)、 PDX2/M(移動量5 mm)、PDX1/M(移動量20 mm)、PD3/M(移動量50 mm)、または回転ステージPDXR1/Mとの接続にご利用いただけます。このケーブルを使用することでケーブルを3 m延長することができます。

 ズーム
ズーム| Key Specificationsa | ||
|---|---|---|
| Item # | KIM001 | KIM101 |
| Piezoelectric Outputs (SMC Male) | One | Four |
| Piezo Output Voltage | 85 to 125 VDC | 85 to 125 VDC per Channel |
| Top Panel Controls | Scroll Wheel | Dual-Axis Joystick |
| External Input (SMA Female) | ±10 V ± 2% | |
| Input Power | +15 VDC @ 2 A | |
| Housing Dimensionsb | 60.0 mm x 60.0 mm x 47.0 mm (2.36" x 2.36" x 1.85") | 121.0 mm x 60.0 mm x 47.0 mm (4.76" x 2.36" x 1.85") |
| Compatible Software | Kinesis | |
| Compatible Piezo Inertia Stagesc | 5 mm Linear Stage, 20 mm Linear Stages, 50 mm Linear Stage, & Rotation Stages | |
- 詳細な仕様は下の赤いアイコン()をクリックしてマニュアルをご覧ください。
- 取付けプレートは含みません。
- 5 mmステージPD2/Mおよび50 mmステージPD3/Mに使用するには、アダプターケーブルPD2ADが必要です。 コントローラKIM001およびKIM101は、光学式エンコーダ付き直線移動ステージPDX1/Mには対応していません。
- コンパクトな設置面積
- 出力電圧の調整範囲:85 V~125 V
- 1チャンネルおよび4チャンネルのタイプをご用意
- 上面のコントロールパネルとディスプレイ画面による単体での操作、またはUSB接続によるPC制御が可能
- 対応するステージについては右表をご覧ください。
こちらのコンパクトなK-Cubeコントローラを用いると、SMCコネクタを使用したピエゾ慣性ステージ、ピエゾ慣性アクチュエータ、およびピエゾ慣性アジャスタ付き光学マウントの手動操作やPC制御が簡単にできます。アダプターケーブルPD2AD(別売り、下記参照)を使用すると、当社の5 mm直線移動ステージPD2/Mや50 mm直線移動ステージPD3/Mにもお使いいただけます。出力電圧の調整範囲は85 V~125 Vです。上面パネルのディスプレイ画面を使用すれば、PCに接続しなくても、ユニットの電源をONにするだけですぐに操作を開始できます。また、どちらのコントローラもUSB接続によるプラグアンドプレイにより、当社のKinesis®ソフトウェアパッケージ(付属します)を用いたPC制御をすぐにご利用いただけます。
設置面積は小さく、ベースプレートのM6用ザグリ穴スロットを使用して光学テーブルに直接取り付けることができます。小型であるため電動システムの近くに設置することができ、これは上面パネルの操作スイッチ類を用いてモータの位置を手動で調整する際には便利です。また、テーブル上で操作すると駆動用ケーブルの長さが短くなり、ケーブルの管理も楽になります。
シングルチャンネルコントローラKIM001
このシングルチャンネルピエゾ慣性コントローラは、1台のピエゾ慣性ステージまたはピエゾ慣性アクチュエータに対して電圧を供給できます。上面パネルにはバネ付きのスクロールホイールがあり、これを用いてステージやアクチュエータを操作したりメニューを選択したりできます。
4チャンネルコントローラKIM101
この4チャンネルコントローラには、ピエゾ慣性デバイスを駆動するためのSMC出力端子が4つ付いています。これらのチャンネルは、上面パネルの2軸ジョイスティックを使用して、それぞれ単独あるいはペアで操作できます。このコントローラは、最大4台までのPDシリーズピエゾ慣性ステージまた PIAシリーズピエゾ慣性アクチュエータ、あるいは2台までのPIMシリーズ ピエゾ慣性光学マウントを操作するように設定できます。1台のKIM101では、コントローラのメニュー選択において同じ「Select Stage」の設定を選択するデバイス以外は、同時に駆動することはできません(詳細はマニュアル参照)。
詳細は製品紹介ページをご参照ください。
操作
こちらのステージを駆動する前に、コントローラKIM001またはKIM101のステージ設定を「PD(R)」に設定してください。「Select Stage」を選択し、「PIA」を「PD(R)」に変更してからコントローラを再起動してください。ディスプレイに「Stage is PD(R)」と表示され、ORIC PDシリーズステージを駆動できるように設定が変更されます。その他の前面パネルでの設定についての詳細は、下の赤いアイコン()をクリックしてコントローラKIM001またはKIM101のマニュアルをご覧ください。このドライバには鋸歯状波形の電圧信号発生器が内蔵されており、85 V~125 Vの範囲で振幅調整の可能なサブミリ秒のパルス(ステップ)を出力できます。
電源について
モーターコントローラKIM001およびKIM101には、電源は付属していません。対応する電源KPS201は別売り(下記参照)でご用意しています。
注:KIM001およびKIM101は、その設計上の特性と非線形の高周波スイッチング技術を使用していることにより、USBコントローラハブ&電源KCH301およびKCH601には対応していません。ご使用いただける電源はKPS201のみです。これらのコントローラはステージPDX1/Mにも対応していません。5 mmステージPD2/Mおよび50 mmステージPD3/Mに使用するには、アダプターケーブルPD2ADが必要です。

 ズーム
ズーム- モーターコントローラKIM001およびKIM101に対応
- 日本国内向けのアダプタープラグが付属
電源KPS201の出力電圧は+15 VDC、最大電流は2.66 Aで、3.5 mmジャックで1台のK-CubeまたはT-Cubeに電力を供給します。標準的な壁コンセントに接続して使用します。