 Products Home / 電動ステージ / 電動直線移動ステージ(リニアステージ):移動量25 mm / ステッピングモーター直線移動ステージ(リニアステージ):移動量25 mm、クロスローラーベアリング
Products Home / 電動ステージ / 電動直線移動ステージ(リニアステージ):移動量25 mm / ステッピングモーター直線移動ステージ(リニアステージ):移動量25 mm、クロスローラーベアリングステッピングモーター直線移動ステージ(リニアステージ):移動量25 mm、クロスローラーベアリング
- All-Steel Stage with 25 mm (0.98") of Travel
- Stepper Motor Actuator for Precise Motion and High Load Capacity
- TravelMax Stage with Crossed Roller Bearings
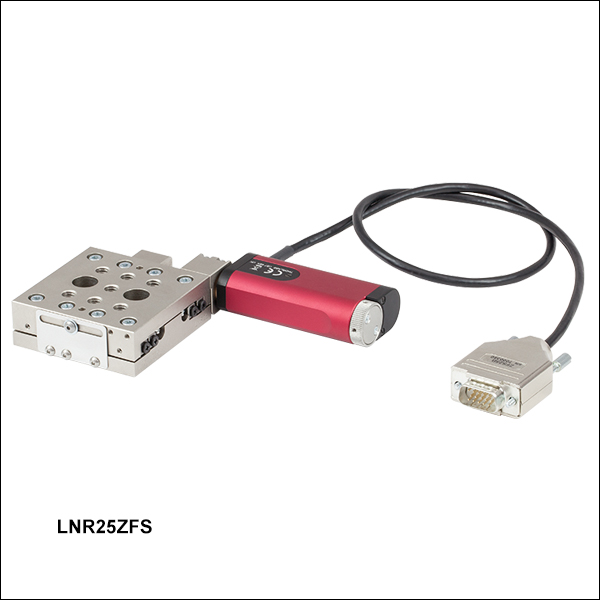
LNR25ZFS
25 mm (0.98") Stepper Motor Translation Stage
LNR25P2
Angle Bracket
Two LNR25ZFS Stages Mounted in an XY Configuration on an LNR25P1 Base Plate








Please Wait
| LNR25ZFS(/M) Specificationsa | ||
|---|---|---|
| Travel | 25 mm (0.98") | |
| Horizontal Load Capacityb | 5 kg (11 lbs) | |
| Vertical Load Capacity | 0.5 kg (1.1 lbs) | |
| Runout Over Full Range | ±1.5 µm | |
| Max Velocityc | 2.0 mm/s | |
| Max Accelerationc | 1.0 mm/s2 | |
| Calculated Minimum Incremental Movement | 0.46 nm | |
| Absolute On-Axis Accuracy | 15 µm | |
| Bidirectional Repeatability | 3.0 µm | |
| Home Switch Accuracy | <5.0 µm | |
| Bearings | Crossed Roller | |
| Body Construction | All Steel | |
| Weight (Including Actuator) | 0.73 kg (1.61 lbs) | |

特長
- 移動量:25 mm
- 小型で双極のステッピングモーターアクチュエータ
- 頑丈な熱整合スチール製ステージ
- 右手用および左手用のXYZ構成が可能
当社の電動直線移動ステージ(リニアステージ)LNR25ZFS/Mは、25 mmの直線移動を電子制御します。 優れた安定性と水平方向の高い耐荷重を特長とし、あらゆる移動の用途に適しています。 この自動ステージは、TravelMax手動式移動ステージLNR25シリーズをベースとする頑丈なスチール設計と強力なクロスローラーベアリングにより、移動の全範囲にわたり均一な性能を発揮します。 熱整合性のある材質を使用することで、安定性のある滑らかな動作が実現され、ステージの性能をさらに高めています。
小型のステッピングモーターアクチュエータ
LNR25ZFS/M は、ステージが小型ステッピングモーターアクチュエータZFS25Bに取り付けられています。アクチュエータは、コンパクトな流線型のパッケージに内蔵され、滑らかで精密な線形移動制御を実現します。 小径の2相ステッピン グモータ駆動により、このアクチュエータは最高速度2.0 mm/sで作動します。 アクチュエータ先端の接触点を非回転式にしたため、摩耗や摩擦が低減され、動作の滑らかさが改善されています。 アクチュエータに電源が供給されない場合でも、後部のつまみネジを使用して手動調整が可能です。
このステッピングモー タ は、最大荷重5 kgを水平方向に移動させる十分なトルクを有しています。 このアクチュエータは、移動範囲全体にわたり非常に小さいステップサイズを可能なため、フレキシブルな動作を高い分解能で実現できます。 減速比400:9のギアヘッド設計により、アクチュエータを49,152マイクロステップ/回転の性能を持つステッピングモータードライバKST201と 組み合わせると、理論的な移動量は1マイクロステップ毎に0.46 nmとなります(詳細については「仕様」」タブをご覧ください)。
ホール効果リミットスイッチは、ユニットのオーバードライブを防ぎ、5.0 μm未満の確度で初期位置への帰還が可能です。 LNR25ZFS/Mには、当社のステッピングモーターコントローラKST201に接続できる15ピンDサブコネクタ付きの0.6 m長のケーブルが付属します(「ピン配列」タブをご覧ください)。
こちらの製品は真空用途の使用にはお勧めいたしません。真空用途には、当社の真空対応DCモーターアクチュエータZ925BVのご使用をお勧めいたします。
| Motorized Linear Translation Stages | |
|---|---|
| 12 mm | Standard |
| 25 mm | Compact |
| Standard | |
| TravelMax | |
| 50 mm | Compact |
| Direct-Drive Servo | |
| TravelMax | |
| Long Travel: 100 mm to 300 mm | |
幅広い取付けオプション
TravelMax™ では、適応性と機能性が配慮された設計がなされています。ステージLNR25ZFS/Mの上面には、7つのM6タップ穴があるので、部品を自由に取り付け ることができます。 上部プラットフォームにある2つの貫通穴から、ステージを作業台に直接ボルトで固定するための2つのM6ザグリ穴にアクセスすることができます。 アクチュエータの取付け位置は、右手用または左手用へと簡単に再構成できます。

Click to Enlarge
ベースプレートLNR25P1

Click to Enlarge
直角ブラケットLNR25P2
ベースプレートLNR25P1(左の写真参照)により取り付けのオプションが増え、また、ステージと作業台の間に隙間を作ることができます。 ザグリ貫通穴は、ステージ底面にあるタップ穴に適合しているため、2つの直交する軸方向に取り付けることができます。 このプレートは、ミリ規格(LNR25ZFS/M)、インチ規格(LNR25ZFS)、どちらのステージにも対応しています。 プレートの寸法は、100 mm x 195 mm x 10 mm(L x W x H)で、付属する2つの位置決めピンと4つのアライメント穴を利用すると、取り付け時に直交性が確保できます。
多数軸の移 動ステージが必要 となる用途では、複数のLNR25ZFS/MステージをXY、XZ、YZ、XYZなどで構成してボルト固定することができます。 直角ブラケットLNR25P2(左の写真参照)を使用することで、Z軸方向への移動のための垂直方向への取り付けができます。 また、このブラケットは、ミリ規格(LNR25ZFS/M)、インチ規格(LNR25ZFS)、どちらのステージにも対応しています。 付属する4つの位 置決めピンと4つのアライメント穴を利用すると、取り付け時に直交性が確保できます。
コントローラのオプション
ステージLNR25ZFS/Mは、K-Cube™ステッピングモーターコントローラST201に対応します(下記参照)。 KST201は、PCを用いなくても単軸移動を制御できます。 セットにはAPT™ソフトウェアが含まれており、PCを用いてステージの制御を行うこともできます。また、LabVIEW、LabWindows、ActiveXなどのプログラミングインターフェイスもサポートしています。 当社のベンチトップ型ステッピングモーターコントローラおよび旧バージョン のT-Cube™ステッピングモーターコントローラTST101では、ステージを動かすことはできません。
分解能の計算
ZFSシリーズモータの各製品の移動量は24フルステップ/回転で、ドライバKST201で駆動した場合では、移動量は2048マイクロステップ/フルステップ、よってモータ1回転の移動量は49,152マイクロステップとなります。 モータの出力軸のギア比は400:9となっています。 これは1.0 mmピッチの送りネジを1回転させるためにモータを44.445回転させる必要があることを意味しています。 最終的に送りネジを1.0 mm移動させるときを想定します。
マイクロステップ毎の送りネジの線形変位量:
マイクロステップ数 x ギア比= 49,152 x 44.445 = 2184560.64
マイクロステップ毎の送りネジの線形変位量は、
1.0 mm / 2184560.64 = 0.46 x 10-6 mm = 0.46 nm ※
※この値は、移動距離からモータの回転量を計算する際に使用する数値であり、実際の移動は機構部の剛性等により制限されるため、0.46 nm単位で移動は出来ません。実際の移動量に関しては、“Bidirectional Repeatability”等の仕様をご参照ください。
LNR25ZFSの仕様
| Specification | Value | |
|---|---|---|
| Translation | ||
| Travel | 25 mm (0.98") | |
| Absolute On-Axis Accuracy | 15 µm | |
| Bidirectional Repeatability | 3.0 µm | |
| Home Location Accuracy | < 5.0 µm | |
| Max Velocitya | 2.0 mm/s | |
| Acceleration | 1.0 mm/s2 (Max) | |
| Stage | ||
| Horizontal Load Capacityb | 5 kg (11 lbs) | |
| Vertical Load Capacity | 0.5 kg (1.1 lbs) | |
| Runout Over Full Range | ±1.5 µm | |
| Bearings | Crossed Roller | |
| Body Construction | All Steel | |
| Actuator | ||
| Gearbox Ratio | 400:9 (Approx 44:1) | |
| Limit Switches | Hall Effect | |
| Lead Screw Pitch | 1.0 mm | |
| Motor Type | 2-Phase Stepper | |
| Microsteps per Revolution of the Motor | 24 Full Steps, 2048 µsteps per Full Step 49,152 µsteps per Revolution | |
| Calculated Minimum Incremental Movement | 0.46 nm | |
| Cable Length | 0.6 m (2 ft) | |
| Connector | HDDB15 | |
| Compatible Controller | KST201 | |
| Physical | ||
| Operating Temperature | 5 to 40 °C (41 to 104 °F) | |
| Dimensions (L x W x H)c | 133.0 mm x 95.0 mm x 20.0 mm (5.24" x 3.74" x 0.79") | |
| Weight (Including Actuator) | 0.73 kg (1.61 lbs) | |
コネクタのピン配列
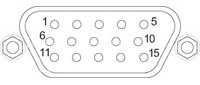
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Limit Ground | 8 | Reserved for Future Use |
| 2 | CCW Limit Switch | 9 | Reserved for Future Use |
| 3 | CW Limit Switch | 10 | Vcc (5 V DC) |
| 4 | Motor Phase B- | 11 | Reserved for Future Use |
| 5 | Motor Phase B+ | 12 | Reserved for Future Use |
| 6 | Motor Phase A- | 13 | Reserved for Future Use |
| 7 | Motor Phase A+ | 14 | Reserved for Future Use |
| 15 | Ground |

当社では幅広い種類のモーションコントローラを駆動できるよう、Kinesis® ソフトウェアパッケージと従来のAPT™(Advanced Positioning Technology)ソフトウェアパッケージの2種類のプラットフォームをご用意しております。どちらのパッケージも小型で低出力のシングルチャンネルドライバ(K-Cube™やT-Cube™など)から高出力でマルチチャンネルのモジュール式19インチラックナノポジショニングシステム(APTラックシステム)まで幅広い種類のモーションコントローラをカバーするKinesisシリーズのデバイスを制御できます。
Kinesisソフトウェアには、最新のC#、Visual Basic、LabVIEW™またはその他の.NETに対応する言語を使用してカスタムプログラムを作成するサードパーティの開発者向けに、.NETコントロールが付属しています。また、.NETフレームワークを使用しない用途向けに低級言語用のDLLライブラリも付いています。センターシーケンスマネージャが、当社の全てのモーションコントロールハードウェアの統合と同期をサポートします。

KinesisのGUIスクリーン
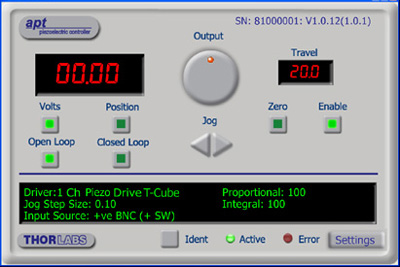
APTのGUIスクリーン
当社従来のAPTシステムソフトウェアプラットフォームは、C#、Visual Basic、LabVIEWまたはその他のActive-Xに対応する言語を使用してカスタムプログラムを作成するサードパーティの開発者向けに、ActiveXをベースとしたコントロールが付属しています。また、ハードウェア無しでカスタムプログラムの開発を行うためのシミュレーターモードも付いています。
これらの共通のソフトウェアプラットフォームにより、あらゆるKinesisとAPTコントローラをシングルアプリケーションに簡単に組み込むことができます。ソフトウェアツールは1セット習得するだけで共通した操作が可能です。シングルチャンネルシステムからマルチチャンネルシステムまで、あらゆるコントローラを組み合わせ、全てを1台のPCのソフトウェアインターフェイスから制御することが実現可能です。
このソフトウェアパッケージを使用するには2つの手段があります。GUI(グラフィカルユーザーインターフェイス)ユーティリティを使用したコントローラとの直接対話ならびに「out of the box」コントロール、またはご選択の開発言語でカスタム統合の位置決めやアライメントソリューションを簡単にプログラムできる一連のプログラミングインターフェイスです。
APTシステムソフトウェアをよりご理解いただけるために様々なチュートリアルビデオもご用意しております。ビデオではソフトウェアの概要とAPT Configユーティリティをご説明しています。また、ソフトウェアのシミュレーターモードを利用すると、コントローラを接続しないでソフトウェアを試すことができます。その方法を説明したビデオもあります。これらのビデオは「APTチュートリアル」タブ内のリンクからご覧いただけます。
ソフトウェア
Kinesis バージョン 1.14.49
このKinesisソフトウェアパッケージには、当社のKinesisならびにAPT™システムコントローラを制御するためのGUIが含まれています。
下記もご用意しております:
- 通信プロトコル
ソフトウェア
APT バージョン 3.21.6
このAPTソフトウェアパッケージには、当社のAPT™およびKinesisシステムコントローラを制御するためのGUIが含まれています。
下記もご用意しております:
- 通信プロトコル
こちらのページでご覧いただくAPTビデオチュートリアルは、付属のATPユーティリティに関する説明と、いくつかのプログラミング環境におけるAPTシステムのプログラミングに関する説明の2つの部分から構成されています。
免責事項:これらの動画は、当初はAdobe Flashによって作成されました。2020年のAdobe Flashのサポート終了後、これらのチュートリアルは再録画されています。各動画の下にはFlash Playerの操作ボタンが見えますが、機能はしません。
APTコントローラには、APTUserユーティリティとAPTConfigユーティリティが付いています。APTUserを用いると、直感的操作が可能なグラフィック制御パネルを介して、APTで制御するハードウェアに素早く簡単に接続することができます。APTConfigは「オフライン」ユーティリティで、メカニカルステージのタイプを事前に選択し、それらを特定のモーションコントローラに対応付けるなど、システム全体のさまざまな設定を行うことができます。
APT Userユーティリティ
下の左側の動画では、APTUserユーティリティの操作概要について説明しています。シングルチャンネルコントローラのOptoDriverは、制御用のPCが無くても前面パネルのコントローラを介して操作できます。前面パネルのコントローラに保存されている操作に関する設定は、APTUserユーティリティを使用して変更することができます。そのプロセスは下の右側の動画でご覧いただけます。
APT Configユーティリティ
シミュレートされたハードウェア構成のセットアップや、メカニカルステージの特定のモータードライブチャンネルへの対応付けなど、APT Configユーティリティを使用してAPTシステム全体の様々な設定ができます。下の最初の動画ではAPT Configの概要をご覧いただけます。シミュレートされたハードウェア構成の作成方法やステージと対応付ける方法についての詳細は、その右側の2つの動画でご覧いただけます。
APTのプログラミング
APTソフトウェアシステムは、ActiveXコントロールのコレクションとして実装されています。ActiveXコントロールは言語に依存しないソフトウェアモジュールで、グラフィカルユーザーインターフェイスとプログラミングインターフェイスの両方を提供します。ハードウェアユニットのタイプごとにActiveXコントロールのタイプがあります。例えば、Motor ActiveXコントロールはすべてのタイプのAPTモーターコントローラ(DCまたはステッパ)の操作に対応します。ActiveXコントロールは多くのWindowsソフトウェア開発環境やソフトウェア言語で直接サポートされており、そのようなコントロールがカスタムアプリケーションに組み込まれると、そこに含まれるすべての機能が即座にアプリケーションで利用できるようになります。下の動画では、LabVIEW、Visual Basic、Visual C++によるAPT ActiveXコントロールの基本的な使用方法について説明しています。これ以外に、LabWindows CVI、C++ Builder、VB.NET、C#.NET、Office VBA、Matlab、HPVEEなどの多数の言語でもActiveXはサポートされています。これらの言語環境についてはチュートリアルのビデオでは特に取り上げていませんが、動画内の考え方の多くは他の言語環境でも適切に使用できます。
Visual Basic
Part 1ではVisual Basicで動作するAPT ActiveXコントロールを設定する方法について説明しており、Part 2では独自の位置決めシーケンスをプログラミングする方法について説明しています。
LabVIEW
LabVIEWはActiveXをフルサポートしています。下の一連のチュートリアルビデオでは、APTによる独自のモーションコントロールシーケンスを作製する際の基本的な構成要素を示しています。まずソフトウェア開発中にオンラインヘルプを呼び出す方法をご紹介します。Part 2ではAPT ActiveXコントロールの作成方法をご紹介します。ActiveXコントロールではメソッド(機能)とプロパティ(数値設定)の両方を設定できます。Part 3と4では、ActiveXコントロールで示されたメソッドとプロパティを作成してワイヤで接続する方法をご紹介します。最後に、Part 5では全体をまとめて、独自の移動シーケンスを実行するLabVIEWのプログラム例をご紹介します。
Part 1:オンラインヘルプへのアクセス方法
Part 2:ActiveXコントロールの作成方法
Part 3:ActiveXのメソッドの作成方法
Part 4:ActiveXのプロパティの作成方法
Part 5:ActiveXコントロールの開始方法
下のチュートリアルビデオでは、メソッドおよびプロパティのノードを作成する別の方法について説明しています。
ActiveXメソッドの作成方法(別の方法)
ActiveXプロパティの作成方法(別の方法)
Visual C++
Part 1ではVisualC++で動作するAPT ActiveXコントロールを設定する方法について説明しており、Part 2では独自の位置決めシーケンスをプログラミングする方法について説明しています。
MATLAB
当社のAPTポジショナにMATLABおよびActiveXコントロールを使用する場合は、こちらの資料をご覧ください。
プログラマー向けとして、LabVIEWでAPTソフトウェアをプログラミングする方法もこちらからご覧いただけます。
| Posted Comments: | |
jan.obrzut
(posted 2018-11-08 15:20:57.543) I need to program the stage from Agilent VEE by sending a text cmd to serial port associated with the device. Will that be possible?
-Jan Obrzut rmiron
(posted 2018-11-15 07:29:21.0) Response from Radu at Thorlabs: Hello Jan. You can control the stage from Agilent VEE by using our APT serial communications protocol. However, the commands making up this protocol are not text commands, but rather arrays of hex bytes (int8 data type). The documentation of the aforementioned protocol can be found here: https://www.thorlabs.com/Software/Motion%20Control/APT_Communications_Protocol.pdf
I will contact you directly in case further assistance is required. wenzel.jakob
(posted 2018-01-09 19:44:22.76) I was wondering if the BSC* series (e.g. BSC201) controllers can also be used to drive the LNR25ZFS? AManickavasagam
(posted 2018-01-10 11:44:47.0) Response by Arunthathi at Thorlabs: Thank you for your query. The BSC series controllers are not compatible with LNR25ZFS. bluewhale
(posted 2017-05-06 16:02:58.2) I would like to know the uni-directional repeatability. The LNR25ZFS has very high Minimum incremental movement. But Bi-directional repeatability seems to be very high compared to its minimum incremental movement. Could you explain how this big difference comes from? and how long incremental movement do you guarantee for the uni-directional repeatability. bwood
(posted 2017-05-08 09:59:52.0) Response from Ben at Thorlabs: Thank you for your feedback. The minimum incremental movement we specify is a calculated figure based on the displacement of the leadscrew of one microstep of the motor of the ZFS actuator. While this figure is useful when considering how many microsteps there are in a given movement, it is, for many physical reasons, not realistic to achieve a single movement of 0.46 nm with the stage. The actual performance of the stage is influenced by issues such as low velocity stalling due to torque hotspots of the motor caused by imperfections of the lead screw bearings, the load of the stage and heat expansion. Thus we specify the bidirectional repeatability, which is a more realistic view of the performance of the stage. As the stage has backlash correction, the uni-directional repeatability will be similar to the bi-directional repeatability. michail.symeonidis
(posted 2016-05-03 17:48:58.24) I would like to ask if the orientation of the stage effects the (vertical) load capacity. To be more precise what is the load capacity if the stage is mounted perpendicular to the x-y plane, but travels along the y (not z) axis.
Thank you for your time and support msoulby
(posted 2016-05-04 10:06:57.0) Response from Mike at Thorlabs: The vertical load capacity is dictated by the actuator used, rather than the stage bearings. So, the horizontal load capacity will apply for horizontal motion, irrespective of whether the stage is mounted on its edge or on its base. The vertical load capacity applies to vertical movement only. haitao
(posted 2015-04-07 06:52:21.457) Dear Sr/Madam,
I am finding a vacuum compatible stage with low profile and travel length. I saw this stage is made of steel, so I wonder whether it is vacuum compatible. Do you have custom vacuum compatible stages? If you have another stage which is vacuum compatible, please tell me. Looking forward to your response! Thanks!
Best,
Haitao
Harvard University bhallewell
(posted 2015-04-09 06:53:27.0) Response from Ben at Thorlabs: Thank you for your question here. In terms of exclusively designed high vacuum compatible products, we produce the Z825BV DC Servo vacuum-compatible actuator which can be fitted with a Custom prepared PT1 stage for use in such an environment. Further details of this can be found in the following link.
http://www.thorlabs.com/newgrouppage9.cfm?objectgroup_id=1883
The LNR25ZFS/M is coated with a red anodised finish & this would not be suitable for vacuum use. |
電動リニアステージ
電動の直線移動ステージとしては、ピエゾ駆動の20 µm移動ステージからダイレクトドライブ方式の600 mm移動ステージまで、様々な最大移動量の製品をご用意しております。ステージの多くは、それらを用いてXY軸やXYZ軸などの多軸ステージを構築することができます。ファイバ結合用としては、多軸ステージのページをご覧ください。標準の電動ステージを用いるよりも精密な調整が可能です。直線移動ステージのほかに、電動の回転ステージおよびゴニオステージもご用意しております。また手動移動ステージもございます。
ピエゾステージ
これらのステージでは、様々な駆動機構にピエゾ素子が組み込まれています。ステージORIC®シリーズでは、「スティック-スリップ」と呼ばれる摩擦特性を利用したピエゾ慣性アクチュエータが用いられており、それにより長い移動距離が得られています。移動ステージNanoflex™シリーズは、手動アクチュエータに加えて標準的なピエゾアクチュエータが用いられています。ステージElliptec®シリーズでは共振ピエゾモータが用いられており、共振に伴うモータ先端の楕円形の動きで可動プラットフォームを押したり引いたりします。Z軸ステージLPS710E/Mにはピエゾ移動に対する機械的な増幅機構が組み込まれており、またそれに適したコントローラが付属しています。
| Piezoelectric Stages | ||||
|---|---|---|---|---|
| Product Family | ORIC® PDXZ1 Closed-Loop 4.5 mm Vertical Stage | ORIC® PD2 Open-Loop 5 mm Stage | ORIC® PDX2 Closed-Loop 5 mm Stage | |
| Click Photo to Enlarge |  |  |  | |
| Travel | 4.5 mm | 5 mm | ||
| Speed | 1 mm/s (Typ.)a | 10 mm/s (Typ. Max)b | 8 mm/s (Typ.)c | |
| Drive Type | Piezoelectric Inertia Drive | |||
| Possible Axis Configurations | Z | X, XY, XYZ | ||
| Mounting Surface Size | 45.0 mm x 42.0 mm | 13 mm x 13 mm | ||
| Additional Details | ||||
| Piezoelectric Stages | |||||
|---|---|---|---|---|---|
| Product Family | ORIC® PD1 Open-Loop 20 mm Stage | ORIC® PD1D Open-Loop 20 mm Monolithic XY Stage | ORIC® PDX1 Closed-Loop 20 mm Stage | ORIC® PD3 Open-Loop 50 mm Stage | |
| Click Photo to Enlarge |  |  | 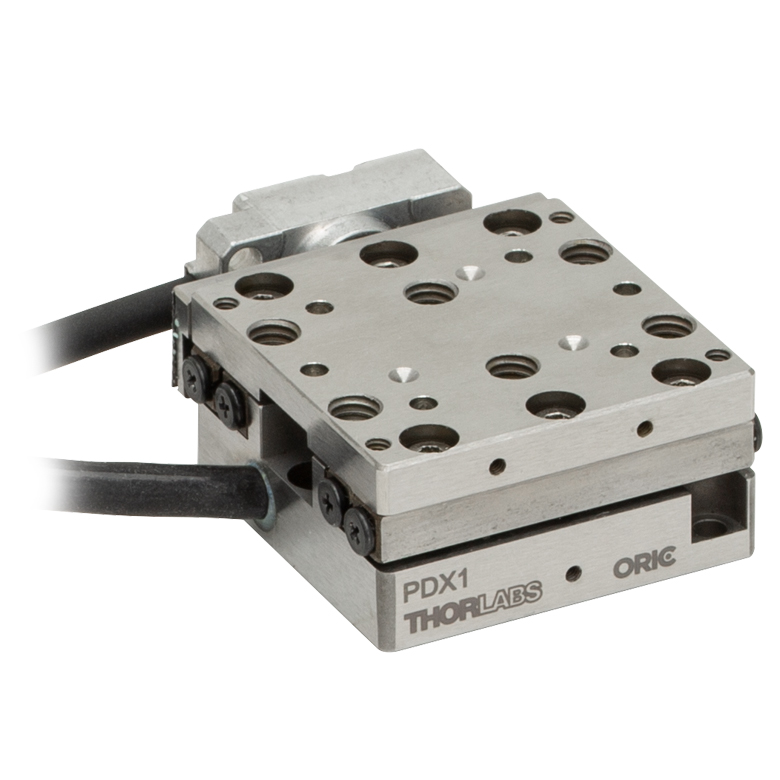 |  | |
| Travel | 20 mm | 50 mm | |||
| Speed | 3 mm/s (Typ. Max)a | 20 mm/s (Typ. Max)b | 10 mm/sc | ||
| Drive Type | Piezoelectric Inertia Drive | ||||
| Possible Axis Configurations | X, XY, XYZ | XY, XYZ | X, XY, XYZ | X, XY, XYZ | |
| Mounting Surface Size | 30 mm x 30 mm | 80 mm x 30 mm | |||
| Additional Details | |||||
| Piezoelectric Stages | ||||||
|---|---|---|---|---|---|---|
| Product Family | Nanoflex™ 20 µm Stage with 5 mm Actuator | Nanoflex™ 25 µm Stage with 1.5 mm Actuator | Elliptec® 28 mm Stage | Elliptec® 60 mm Stage | LPS710E 1.1 mm Vertical Stage | |
| Click Photo to Enlarge |  |  | 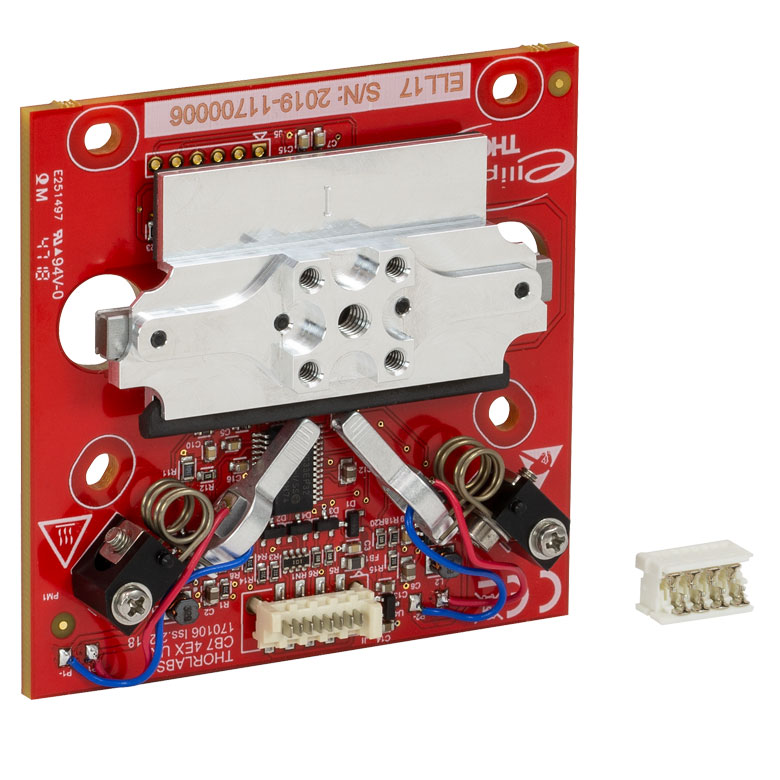 |  |  | |
| Travel | 20 µm + 5 mm Manual | 25 µm + 1.5 mm Manual | 28 mm | 60.0 mm | 1.1 mm | |
| Maximum Velocity | - | 180 mm/s | 90 mm/s | - | ||
| Drive Type | Piezo with Manual Actuator | Resonant Piezoelectric Motor | Amplified Piezo | |||
| Possible Axis Configurations | X, XY, XYZ | X | Z | |||
| Mounting Surface Size | 75 mm x 75 mm | 30 mm x 30 mm | 15 mm x 15 mm | 21 mm x 21 mm | ||
| Additional Details | ||||||
ステッピングモーターステージ
こちらの移動ステージは脱着型あるいは内蔵型のステッピングモータを用いており、また300 mmまでの長い移動量が可能です。ステージの多くは多軸構成(PLSXY)や、多軸ステージ(PLSX、LNRシリーズ、NRTシリーズ、LTSシリーズ)への組み込みが可能です。ステージMLJ150/Mは高荷重にも対応する垂直移動ステージです。
| Stepper Motor Stages | |||||
|---|---|---|---|---|---|
| Product Family | PLSX with and without PLST(/M) Top Plate 1" Stage | PLSXY with and without PLST(/M) Top Plate 1" Stage | LNR Series 25 mm Stage | LNR Series 50 mm Stage | |
| Click Photo to Enlarge |  |  |  |  | |
| Travel | 1" | 25 mm | 50 mm | ||
| Maximum Velocity | 7.0 mm/s | 2.0 mm/s | 50 mm/s | ||
| Possible Axis Configurations | X, XY | X, XY, XYZ | X, XY, XYZ | ||
| Mounting Surface Size | 3" x 3" | 60 mm x 60 mm | 100 mm x 100 mm | ||
| Additional Details | |||||
| Stepper Motor Stages | ||||||
|---|---|---|---|---|---|---|
| Product Family | NRT Series 100 mm Stage | NRT Series 150 mm Stage | LTS Series 150 mm Stage | LTS Series 300 mm Stage | MLJ250 50 mm Vertical Stage | |
| Click Photo to Enlarge |  |  |  |  |  | |
| Travel | 100 mm | 150 mm | 150 mm | 300 mm | 50 mm | |
| Maximum Velocity | 30 mm/s | 50 mm/s | 3.0 mm/s | |||
| Possible Axis Configurations | X, XY, XYZ | X, XY, XYZ | Z | |||
| Mounting Surface Size | 84 mm x 84 mm | 100 mm x 90 mm | 148 mm x 131 mm | |||
| Additional Details | ||||||
DCサーボモーターステージ
脱着型あるいは内蔵型のDCサーボモータを用いた直線移動ステージをご用意しております。これらのステージは薄型で、多軸ステージの構築が可能です。
| DC Servo Motor Stages | ||||
|---|---|---|---|---|
| Product Family | MT Series 12 mm Stages | PT Series 25 mm Stages | MTS Series 25 mm Stage | MTS Series 50 mm Stage |
| Click Photo to Enlarge |  |  |  |  |
| Travel | 12 mm | 25 mm | 25 mm | 50 mm |
| Maximum Velocity | 2.6 mm/s | 2.4 mm/s | ||
| Possible Axis Configurations | X, XY, XYZ | X, XY, XYZ | ||
| Mounting Surface Size | 61 mm x 61 mm | 101.6 mm x 76.2 mm | 43 mm x 43 mm | |
| Additional Details | ||||
| DC Servo Motor Stages | ||||
|---|---|---|---|---|
| Product Family | M30 Series 30 mm Stage | M30 Series 30 mm Monolithic XY Stage | M150 Series 150 mm XY Stage | KVS30 30 mm Vertical Stage |
| Click Photo to Enlarge |  |  |  |  |
| Travel | 30 mm | 150 mm | 30 mm | |
| Maximum Velocity | 2.4 mm/s | X-Axis: 170 mm/s Y-Axis: 230 mm/s | 8.0 mm/s | |
| Possible Axis Configurations | X, Z | XY, XZ | XY | Z |
| Mounting Surface Size | 115 mm x 115 mm | 272.4 mm x 272.4 mm | 116.2 mm x 116.2 mm | |
| Additional Details | ||||
ダイレクトドライブステージ
こちらの薄型ステージにはブラシレスDCサーボモータが内蔵されており、バックラッシュの無い高速移動が可能です。電源が入ってないときは、ステージのプラットフォームにはほとんど慣性が無く、実質的にフリーラン状態になります。そのため電源が入ってないときにステージのプラットフォームが定位置に留まる必要のある用途には適していません。これらのステージを垂直方向に取付けることは推奨しません。
| Direct Drive Stages | |||||
|---|---|---|---|---|---|
| Product Family | DDS Series 50 mm Stage | DDS Series 100 mm Stage | DDS Series 220 mm Stage | DDS Series 300 mm Stage | DDS Series 600 mm Stage |
| Click Photo to Enlarge |  |  |  |  |  |
| Travel | 50 mm | 100 mm | 220 mm | 300 mm | 600 mm |
| Maximum Velocity | 500 mm/s | 300 mm/s | 400 mm/s | 400 mm/s | |
| Possible Axis Configurations | X, XY | X, XY | X | X | |
| Mounting Surface Size | 60 mm x 52 mm | 88 mm x 88 mm | 120 mm x 120 mm | ||
| Additional Details | |||||

 ズーム
ズーム- LNR25ZFS(/M)は25 mmの電動式移動が可能です。
- ステッピングモーターアクチュエータによる滑らかで精密な線形移動
- コントローラならびに電源は別売
ステッピングモータ付き移動ステージLNR25ZFS/Mは、25 mmの線形移動を行います。 M6タップ穴が7個付いているので、様々なオプトメカニクス系に簡単に組み込むことができます。 ステージの頑丈なスチール構造と、高耐荷重クロスローラーベアリングにより、優れた安定性と高耐荷重が実現しています。 移動ステージの操作にはコントローラと電源が必要ですが、 当社の K-Cube™ステッピングモーターコントローラKST201をお勧めいたします。詳細については下記でご案内しております。 また、ステージ用の取付けベースプレートならびに垂直取付けブラケットも下記でご紹介しております。

 ズーム
ズーム- ステージLNR25ZFS/Mを取り付けて、多軸構成を構築
- ミリ規格ならびにインチ規格のステージに共用の汎用アクセサリ
- 位置決めピンによる正確なアライメント
ベースプレートLNR25P1ならびに直角ブラケットLNR25P2は、ステージLNR25ZFS/M用の取付用アクセサリです。ベースプレートLNR25P1には4つのザグリ貫通穴があり、LNR25ZFS/Mを2つの直交する軸方向に取り付けることができます。直角ブラケットLNR25P2には垂直取付け面があり、XZ、YZ、XYZ構成を構築できます。これらの取付け用アクセサリは、ミリ規格、インチ規格のいずれのステージにも対応しています。

 ズーム
ズーム
- 前面パネルに電動ステージやアクチュエータ制御用の速度ホイールとデジタル表示画面
- 2つの双方向トリガーポート(外部機器からの信号読み取りや外部機器の制御用)
- 付属のUSBケーブルでPCに接続
- Kinesis®ならびにAPT™ソフトウェアパッケージに対応
- コンパクトな設置面積: 60.0 mm x 60.0 mm x 49.2 mm
- 電源は付属しません(下記参照)
K-Cube™ステッピングモーターコントローラK-Cube™ KST101を用いると、1台のモータの回転軸を手動またはPCで制御することができます。上面のコントロールパネルにある速度ホイールにより、前後2方向へのジョグ動作や速度制御しながらの移動、さらに位置のプリセットが可能です。 上面パネルのデジタル表示にはバックライトが付いており、メニュー選択により暗くしたり消灯したりすることが可能です。ユニット前面には双方向のトリガーポートが2つあり、5 Vの外部ロジック信号を読み取ることや、5 Vロジック信号を出力して外部機器を制御することができます。 それぞれのポートの機能は独立に設定することができます。
このユニットは当社の新しいKinesisソフトウェアパッケージならびに従来のAPTコントロールソフトウェアに対応します。 詳細は「モーションコントロールソフトウェア」のタブをご覧ください。
このコントローラには電源が付属しませんのでご注意ください。 対応可能な電源は下記のとおりです。

 ズーム
ズーム
Click to Enlarge
電源ユニットKPS201(日本国内向けアダプタと共に発送します)
- 電源(単体)
- KPS201: K-Cubes™ 、T-Cubes™ 用、3.5 mmジャック付き
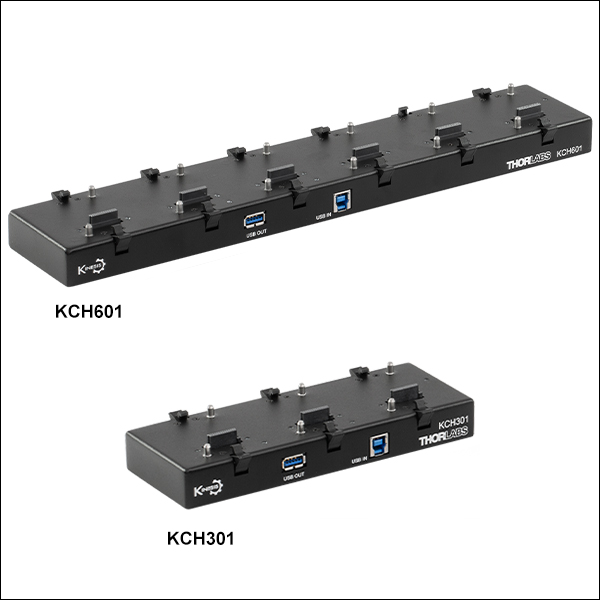
- 電源供給と通信機能を備えたUSBコントローラハブ
- KCH301: 3台までのK-CubeまたはT-Cube用
- KCH601: 6台までのK-CubeまたはT-Cube用
電源KPS201の出力電圧は+15 VDC、最大電流は2.66 Aで、3.5 mmジャックで1台のK-CubeまたはT-Cubeに電力を供給します。標準的な壁コンセントに接続して使用します。
USBコントローラーハブKCH301およびKCH601は次の2つの機能を有しています。1つはハブ機能で、最大3台(KCH301)または6台(KCH601)までのK-CubeまたはT-Cubeをサポートします。もう1つは電源機能で、標準的な壁コンセントに接続するだけで必要な電力の供給を行います。ただし、ハブが供給できる最大電流は10 Aです。お使いになる全Cubeの必要電流が合計で10 A以上にはならないことをお確かめください。 また、このハブに取り付けられたすべてのT-CubeやK-Cubeに対して、1本のUSBケーブルで接続することができます。
USBコントローラハブの詳細は、製品ページをご参照ください。