 Products Home
Products HomeXY移動ステージ(リニアステージ)Kinesis® 、移動量30 mm、コントローラー内蔵、ブラシ付きDCサーボモーター

- 30 mm Travel Along X and Y Axes at Speeds Up to 2.4 mm/s
- Integrated DC Servo Motors and Control Electronics
- Bidirectional Repeatability of ±1.0 µm
M30XY
30 mm XY Translation Stage
The unit features connections for PC control and external triggering.








Please Wait
| Key Specificationsa | |
|---|---|
| Travel | 30 mm x 30 mm (1.18" x 1.18") |
| Load (Max) | Horizontal: 5.0 kg (11.02 lbs) Vertical: 2.0 kg (4.41 lbs) |
| Speed (Max) | 2.4 mm/s (All Loads) |
| Bidirectional Repeatability | ±1.0 µm |
| Pitch Angular Deviation | ±100 µrad |
| Yaw Angular Deviation | ±50 µrad |
| Dimensions | 115 mm x 115 mm x 40 mm (4.53" x 4.53" x 1.57") |

特長
- 高精度電動XYステージ
- USBを介したPCによるリモート操作
- I/Oポートを介した双方向の外部トリガ(5 V TTL)
- DCサーボ駆動による滑らかな線形移動
- Kinesis® 制御用ソフトウェア一式が付属
- M6タップ穴付きの大型の取付けプラットフォーム
- 日本国内用の電源が付属
- XZ移動ステージとするための垂直取付け用ブラケットM30A2/M(別売り)
電動XY移動ステージ(リニアステージ)M30XY/Mは、駆動回路が内蔵されたDCサーボ駆動の2軸自動ステージです。全移動範囲にわたり、安定した精密直線移動で位置調整ができます。このステージのモータは、ピッチ方向とロール方向の偏差を最小限に抑えながら、115 mm x 115 mmの大型プラットフォームに取付けられた最大5.0 kgまでの荷重を移動させることができます。再循環ベアリングと光学式リニアエンコーダにより、高い位置決め精度と再現性が得られます。仕様の詳細については、「仕様」タブをご参照ください。
上部プレートには、光学サブアセンブリを取り付けるための25個のM6タップ穴が25.0 mm間隔で開いています。各ユニットのベースにはM6ネジに対応した貫通穴が4つあり、これでステージをブレッドボードに取り付けます。日本国内用の電源が付属します。ユニット側面に付いているコネクタは、不用意に接続が外れないよう、クランプM30A1を使用して固定することができます。これらは、このステージを垂直方向に取り付けたり、あるいはほかのステージやアセンブリの上に取り付けるときに便利です。なお、電源(PSU)をコンセントの差込口に接続する前に、PSUとステージを接続しておいてください。ステージをPC制御するためのUSBケーブルも付属しています。
ステージ側面のUSBポートを介してPCに接続し、当社のKinesis®ソフトウェアを使用して制御することができます。このソフトウェアでは新しい.NETコントロールを使用できるため、最新のC#、Visual Basic、LabVIEW、あるいはその他の.NET対応言語を使用してカスタムプログラムを作成することもできます。パラメータはPC上で調整して設定でき、またそれをユニット内の不揮発性メモリに保存できます。次にユニットが作動したときには、それらの設定が自動的に適用されます。詳細については「Kinesisソフトウェア」または「Kinesisチュートリアル」のタブをご覧ください。また、ユニットの2つのI/Oポートを使用することで、双方向での外部トリガが可能です。
| Specificationsa | |
|---|---|
| Travel | 30 mm x 30 mm (1.18" x 1.18") |
| Max Speed | 2.4 mm/s |
| Acceleration | 5.0 mm/s 2 |
| Bidirectional Repeatability | ±1.0 µm |
| Backlasha | N/A |
| Min Repeatable Incremental Movement | 2.5 µm |
| Home Location Accuracy | ±1.75 µm |
| Max Load | Horizontal Mounting: 5.0 kg (11.02 lbs) Vertical Mounting: 2.0 kg (4.41 lbs) |
| Accuracy | 8 µm |
| Pitch Angular Deviation | ±100 µrad |
| Yaw Angular Deviation | ±50 µrad |
| Horizontal Straightness | ±2.5 µm |
| Vertical Straightness | ±2.5 µm |
| Limit Switches | X and Y as Standard |
| Bearing Type | High Rigidity Recirculating Precision Linear Bearing |
| Motor Type | Brushed DC Motor |
| Motor Output | |
| Motor Drive Voltage | ±15 V |
| Motor Drive Current (per Axis, Loaded)b | < 100 mA (Continuous) < 150 mA (Vertical Movement) |
| Control Algorithm | Digital PID Filter (16 Bit) |
| Position Counter | 32 Bit |
| Velocity Profie | Trapezoidal |
| Input Power Requirements | |
| Voltage | 15 V Regulated DC |
| Current | 500 mA (Peak) |
| General Data | |
| Dimensions at Mid Travel (W x D x H) | 115 mm x 115 mm x 40 mm (4.53" x 4.53" x 1.57") |
| Weight | 1.2 kg (2.65 lbs) |
PC接続
USB 2.0 Mini-ABコネクタ
I/O 1MMCXメス | I/O 2MMCXメス |
 | |
| +5 V TTL | +5 V TTL |
| これらのコネクタを外部トリガ信号(5 V TTLレベル)の入力に使用するか、あるいは出力に使用するかはそれぞれコネクタごとに設定できます。 | |
| 入力モードにおいては、1.5 V以下の電圧はLowレベル、3.5 V以上の電圧をHighレベルとして認識します。入力端は弱くプルアップされているため、何も接続されていない入力端はデフォルトではHighレベルになります。弱くプルアップされているため、メカニカルスイッチなどのパッシブ型のデバイスを直接入力端子に接続することができます。 | |
| 出力モードでは、ポートは5 Vのプッシュプル動作(最大電流8 mA)を行います。 | |
電源
3.15 mmジャックコネクタ
ステージM30XY/Mには下記が含まれます。
- 2軸移動ステージ
- MMCXオス-BNCオスケーブル(2本)、長さ1.8 m、50 Ω
- USB2.0 A-Mini-Bケーブル、1.5 m、黒
- 15 VDC電源(国内用)
用途例
直線移動ステージM30XY/Mは、M6 x 1.0のタップ穴が25.0 mm間隔で並んだ上部プレートと、4つのM6ネジ用貫通穴のある下部プレートで構成されており、これらを用いて当社の他の移動ステージに取り付けることができます。この直線移動ステージに他の移動軸を追加してアセンブリを構築することで、検査、レーザのアライメント、ファイバへの光結合時のアライメント、顕微鏡など、様々な用途にご使用いただけます。 アセンブリの例は下の表でご覧いただけます。
| M30XY(/M) Example Assemblies | |||
|---|---|---|---|
| Item #s | M30X(/M) M30XY(/M) M30A1 (Qty. 2) M30A2(/M) | M30XY(/M) M30A1 KVS30(/M) | M30XY(/M) MAX311D(/M) |
| Image (Click to Enlarge) |  |  |  |
| Axis Configuration | XYZ | XYZ | XY and XYZ |
| Integrated Controllers |  | | -a |
| Fully Automated | | | |
| Motor Type | DC Servo | DC Servo | DC Servo Closed-Loop Piezo |
| Vertical Load | 2 kg | 5 kg | 1 kg |
| Travel | 30 mm (X, Y, and Z) | 30 mm (X, Y, and Z) | Servo: 30 mm (X and Y) |
| Piezo: 20 µm +0.2 µm / -0.0µm (X, Y, and Z) Coarse Differential: 4 mm (X, Y, and Z) Fine Differential: 0.3 mm (X, Y, and Z) | |||
| Repeatability | ±1 µm (X, Y, and Z) | ±1 µm (X and Y) ± 0.12 µm (Z) | Servo: ±1 µm Piezo: ±25 nm |
| Accuracy | 8 µm (X, Y, and Z) | 8 µm (X and Y) 0.9 µm (Z) | - |
| Velocity | 2.4 mm/s (X, Y, and Z) | 2.4 mm/s (X and Y) 8 mm/s (Z) | - |
ソフトウェア
Kinesisバージョン1.14.50
このKinesisソフトウェアパッケージには、当社のKinesisシステムコントローラを制御するためのGUIが含まれています。
下記もご用意しております。
- 通信プロトコル

KinesisソフトウェアのGUI画面
当社のKinesis®ソフトウェアパッケージを用いて、当社の様々なモーションコントローラを駆動することができます。このソフトウェアは小型で低出力のシングルチャンネルドライバ(K-Cubes™など)から、高出力でマルチチャンネルのベンチトップ型ユニットやモジュール型の19インチラックナノポジショニングシステム(ラックシステムMMR60x)まで、当社Kinesisシリーズの様々なモーションコントローラの制御用にご使用いただけます。
Kinesisソフトウェアでは.NETコントロールを使用できるため、最新のC#、Visual Basic、LabVIEW™、あるいはその他の.NET対応言語を使用してカスタムプログラムを作成することができます。.NETフレームワークの使用を想定していないアプリケーションのために、ローレベルのDLLライブラリも含まれています。また、APIは各インストールに含まれています。中央シーケンスマネージャ(Central Sequence Manager)は、当社のすべてのモーションコントロール用ハードウェアの統合と同期の機能をサポートしています。
この共通のソフトウェアプラットフォームにより、ユーザは単一のソフトウェアツールを習得するだけで、あらゆるモーションコントロールデバイスを1つのアプリケーション内で組み合わせて使用することができます。このように1軸システム用から多軸システム用までのあらゆるコントローラを組み合わせ、それら全てを1台のPCの統合されたソフトウェアインターフェイスから制御できます。
このソフトウェアパッケージには2つの使い方があります。1つはGUI(グラフィカルユーザーインターフェイス)ユーティリティを用いる方法で、コントローラの到着後すぐに直接的な操作と制御を行なうことができます。もう1つは一連のプログラミングインターフェイスを用いる方法で、ご希望の開発言語によりカスタム仕様の位置決めやアライメント用のプログラムを簡単に作成することができます。
APTソフトウェア
一部の製品はAPT™ソフトウェアパッケージでも操作が可能です。ソフトウェアに関する情報は、赤いアイコン( )内の資料に記載されています。APTソフトウェアの詳細については、こちらを参照してください。
)内の資料に記載されています。APTソフトウェアの詳細については、こちらを参照してください。
Kinesis®ソフトウェアでは新しい.NETコントロールが使用でき、最新の最新のC#, Visual Basic, LabVIEW™、ほかの.NET対応言語を使用する開発者がカスタムにプログラムを作成することもできます。
C#
このプログラミング言語はマルチプログラミングパラダイムやマルチプログラミング言語が使用可能となるよう設計されているため、複雑な問題が簡単かつ効率的に解決できます。型付け、命令型、宣言型、関数型、ジェネリック、オブジェクト指向、そしてコンポーネント指向が含まれます。 この共通のソフトウェアプラットフォームにより、1セットのソフトウェアツールを習得するだけで、あらゆるKinesisコントローラを簡単に組み合わせることができます。このようにして1軸システムのコントローラから多軸システムのコントローラまで、様々なコントローラを組み合わせ、全てを1台のPCのソフトウェアインターフェイスから制御することが可能となりました。
Kinesisシステムソフトウェアを使用するには2つの手段があります。コントローラを直接つないで制御を行なう付属のGUI(グラフィカルユーザーインターフェイス)ユーティリティ、またはご希望の開発言語でカスタム仕様の位置決めやアライメントを簡単にプログラムできる一連のプログラミングインターフェイスです。
Kinesisモーションコントロールライブラリの構築の参考となる実行可能なプロジェクト機能拡張例については下のリンクをクリックしてください。なお、Quick Startのプロジェクト例の実行には別の統合開発環境(IDE)(Microsoft Visual Studioなど)が必要です。C#のプロジェクト例はKinesisソフトウェアパッケージに付属する.NETコントロールで実行可能です(詳細は「Kinesisソフトウェア」タブをご覧ください)。
 | Click Here for the Kinesis with C# Quick Start Guide Click Here for C# Example Projects Click Here for Quick Start Device Control Examples | |
LabVIEW
LabVIEWは、.Netコントロールを介してKinesisまたはAPTベースのコントローラとの通信に使用できます。LabVIEWでは、ツールとオブジェクトでフロントパネルとして知られるユーザーインターフェイスを構築した後、グラフィカル表記の関数を使ってコードを追加し、フロントパネルのオブジェクトを制御します。下記のLabVIEWチュートリアルでは.Netコントロールを使用してLabVIEW内KinesisまたはAPT駆動デバイス用の制御GUIを作成するための情報をご提供しています。 LabVIEWでコントローラを制御する基本的な方法や、LabVIEW GUIを用いてデバイスを操作する前に行うべき設定の手順についても解説しています。
 | Click Here to View the LabVIEW Guide Click Here to View the Kinesis with LabVIEW Overview Page | |
電動リニアステージ
電動の直線移動ステージとしては、ピエゾ駆動の20 µm移動ステージからダイレクトドライブ方式の600 mm移動ステージまで、様々な最大移動量の製品をご用意しております。ステージの多くは、それらを用いてXY軸やXYZ軸などの多軸ステージを構築することができます。ファイバ結合用としては、多軸ステージのページをご覧ください。標準の電動ステージを用いるよりも精密な調整が可能です。直線移動ステージのほかに、電動の回転ステージおよびゴニオステージもご用意しております。また手動移動ステージもございます。
ピエゾステージ
これらのステージでは、様々な駆動機構にピエゾ素子が組み込まれています。ステージORIC®シリーズでは、「スティック-スリップ」と呼ばれる摩擦特性を利用したピエゾ慣性アクチュエータが用いられており、それにより長い移動距離が得られています。移動ステージNanoflex™シリーズは、手動アクチュエータに加えて標準的なピエゾアクチュエータが用いられています。ステージElliptec®シリーズでは共振ピエゾモータが用いられており、共振に伴うモータ先端の楕円形の動きで可動プラットフォームを押したり引いたりします。Z軸ステージLPS710E/Mにはピエゾ移動に対する機械的な増幅機構が組み込まれており、またそれに適したコントローラが付属しています。
| Piezoelectric Stages | ||||
|---|---|---|---|---|
| Product Family | ORIC® PDXZ1 Closed-Loop 4.5 mm Vertical Stage | ORIC® PD2 Open-Loop 5 mm Stage | ORIC® PDX2 Closed-Loop 5 mm Stage | |
| Click Photo to Enlarge |  |  |  | |
| Travel | 4.5 mm | 5 mm | ||
| Speed | 1 mm/s (Typ.)a | 10 mm/s (Typ. Max)b | 8 mm/s (Typ.)c | |
| Drive Type | Piezoelectric Inertia Drive | |||
| Possible Axis Configurations | Z | X, XY, XYZ | ||
| Mounting Surface Size | 45.0 mm x 42.0 mm | 13 mm x 13 mm | ||
| Additional Details | ||||
| Piezoelectric Stages | |||||
|---|---|---|---|---|---|
| Product Family | ORIC® PD1 Open-Loop 20 mm Stage | ORIC® PD1D Open-Loop 20 mm Monolithic XY Stage | ORIC® PDX1 Closed-Loop 20 mm Stage | ORIC® PD3 Open-Loop 50 mm Stage | |
| Click Photo to Enlarge |  |  | 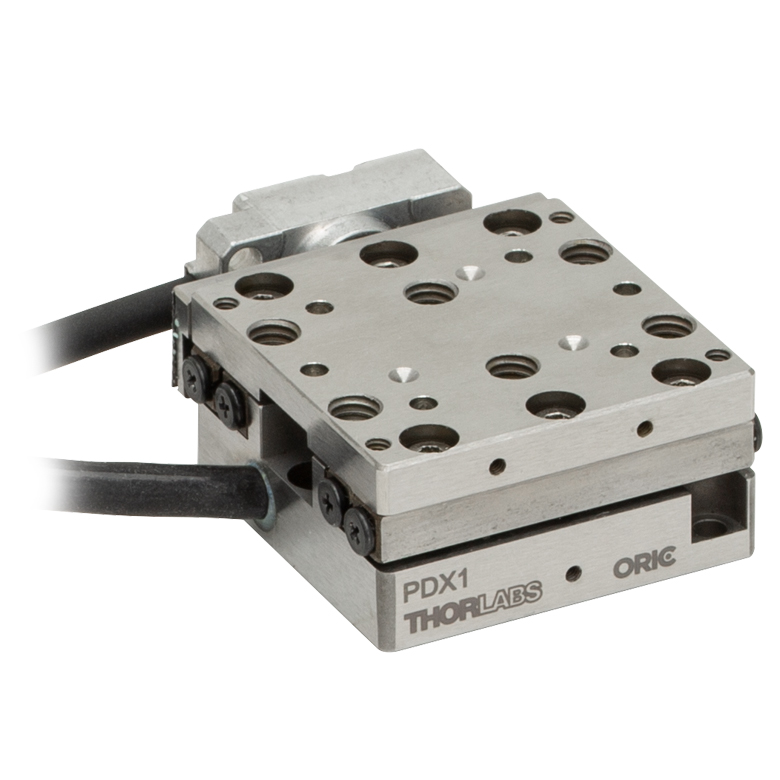 |  | |
| Travel | 20 mm | 50 mm | |||
| Speed | 3 mm/s (Typ. Max)a | 20 mm/s (Typ. Max)b | 10 mm/sc | ||
| Drive Type | Piezoelectric Inertia Drive | ||||
| Possible Axis Configurations | X, XY, XYZ | XY, XYZ | X, XY, XYZ | X, XY, XYZ | |
| Mounting Surface Size | 30 mm x 30 mm | 80 mm x 30 mm | |||
| Additional Details | |||||
| Piezoelectric Stages | ||||||
|---|---|---|---|---|---|---|
| Product Family | Nanoflex™ 20 µm Stage with 5 mm Actuator | Nanoflex™ 25 µm Stage with 1.5 mm Actuator | Elliptec® 28 mm Stage | Elliptec® 60 mm Stage | LPS710E 1.1 mm Vertical Stage | |
| Click Photo to Enlarge |  |  |  |  |  | |
| Travel | 20 µm + 5 mm Manual | 25 µm + 1.5 mm Manual | 28 mm | 60.0 mm | 1.1 mm | |
| Maximum Velocity | - | 180 mm/s | 90 mm/s | - | ||
| Drive Type | Piezo with Manual Actuator | Resonant Piezoelectric Motor | Amplified Piezo | |||
| Possible Axis Configurations | X, XY, XYZ | X | Z | |||
| Mounting Surface Size | 75 mm x 75 mm | 30 mm x 30 mm | 15 mm x 15 mm | 21 mm x 21 mm | ||
| Additional Details | ||||||
ステッピングモーターステージ
こちらの移動ステージは脱着型あるいは内蔵型のステッピングモータを用いており、また300 mmまでの長い移動量が可能です。ステージの多くは多軸構成(PLSXY)や、多軸ステージ(PLSX、LNRシリーズ、NRTシリーズ、LTSシリーズ)への組み込みが可能です。ステージMLJ150/Mは高荷重にも対応する垂直移動ステージです。
| Stepper Motor Stages | |||||
|---|---|---|---|---|---|
| Product Family | PLSX with and without PLST(/M) Top Plate 1" Stage | PLSXY with and without PLST(/M) Top Plate 1" Stage | LNR Series 25 mm Stage | LNR Series 50 mm Stage | |
| Click Photo to Enlarge |  |  |  |  | |
| Travel | 1" | 25 mm | 50 mm | ||
| Maximum Velocity | 7.0 mm/s | 2.0 mm/s | 50 mm/s | ||
| Possible Axis Configurations | X, XY | X, XY, XYZ | X, XY, XYZ | ||
| Mounting Surface Size | 3" x 3" | 60 mm x 60 mm | 100 mm x 100 mm | ||
| Additional Details | |||||
| Stepper Motor Stages | ||||||
|---|---|---|---|---|---|---|
| Product Family | NRT Series 100 mm Stage | NRT Series 150 mm Stage | LTS Series 150 mm Stage | LTS Series 300 mm Stage | MLJ250 50 mm Vertical Stage | |
| Click Photo to Enlarge |  |  |  |  |  | |
| Travel | 100 mm | 150 mm | 150 mm | 300 mm | 50 mm | |
| Maximum Velocity | 30 mm/s | 50 mm/s | 3.0 mm/s | |||
| Possible Axis Configurations | X, XY, XYZ | X, XY, XYZ | Z | |||
| Mounting Surface Size | 84 mm x 84 mm | 100 mm x 90 mm | 148 mm x 131 mm | |||
| Additional Details | ||||||
DCサーボモーターステージ
脱着型あるいは内蔵型のDCサーボモータを用いた直線移動ステージをご用意しております。これらのステージは薄型で、多軸ステージの構築が可能です。
| DC Servo Motor Stages | ||||
|---|---|---|---|---|
| Product Family | MT Series 12 mm Stages | PT Series 25 mm Stages | MTS Series 25 mm Stage | MTS Series 50 mm Stage |
| Click Photo to Enlarge |  |  |  |  |
| Travel | 12 mm | 25 mm | 25 mm | 50 mm |
| Maximum Velocity | 2.6 mm/s | 2.4 mm/s | ||
| Possible Axis Configurations | X, XY, XYZ | X, XY, XYZ | ||
| Mounting Surface Size | 61 mm x 61 mm | 101.6 mm x 76.2 mm | 43 mm x 43 mm | |
| Additional Details | ||||
| DC Servo Motor Stages | ||||
|---|---|---|---|---|
| Product Family | M30 Series 30 mm Stage | M30 Series 30 mm Monolithic XY Stage | M150 Series 150 mm XY Stage | KVS30 30 mm Vertical Stage |
| Click Photo to Enlarge |  |  |  |  |
| Travel | 30 mm | 150 mm | 30 mm | |
| Maximum Velocity | 2.4 mm/s | X-Axis: 170 mm/s Y-Axis: 230 mm/s | 8.0 mm/s | |
| Possible Axis Configurations | X, Z | XY, XZ | XY | Z |
| Mounting Surface Size | 115 mm x 115 mm | 272.4 mm x 272.4 mm | 116.2 mm x 116.2 mm | |
| Additional Details | ||||
ダイレクトドライブステージ
こちらの薄型ステージにはブラシレスDCサーボモータが内蔵されており、バックラッシュの無い高速移動が可能です。電源が入ってないときは、ステージのプラットフォームにはほとんど慣性が無く、実質的にフリーラン状態になります。そのため電源が入ってないときにステージのプラットフォームが定位置に留まる必要のある用途には適していません。これらのステージを垂直方向に取付けることは推奨しません。
| Direct Drive Stages | |||||
|---|---|---|---|---|---|
| Product Family | DDS Series 50 mm Stage | DDS Series 100 mm Stage | DDS Series 220 mm Stage | DDS Series 300 mm Stage | DDS Series 600 mm Stage |
| Click Photo to Enlarge |  |  |  |  |  |
| Travel | 50 mm | 100 mm | 220 mm | 300 mm | 600 mm |
| Maximum Velocity | 500 mm/s | 300 mm/s | 400 mm/s | 400 mm/s | |
| Possible Axis Configurations | X, XY | X, XY | X | X | |
| Mounting Surface Size | 60 mm x 52 mm | 88 mm x 88 mm | 120 mm x 120 mm | ||
| Additional Details | |||||
| Posted Comments: | |
user
(posted 2024-04-26 11:22:30.78) I have a question regarding the position accuracy of the stage model M30XY/M.
Let me first describe use-case scenario. I am performing a typical knife-edge measurement to profile a laser beam diameter. In more detail, the knife is mounted on the M30XY/M stage. The stage moves the knife in small, discrete steps in one direction across the laser beam. For each knife position, I am recording the transmitted laser power and the stage position as displayed in the kinesis software/obtained via the API.
I was wondering how accurate the displayed knife-positions are. On the spec sheet, I see a value for accuracy of 8µm. Is this the correct tolerance or is the bidirectional repeatability more relevant for my application?
Is the specified accuracy tolerance a symmetric (i.e., "plus-minus")-tolerance? E.g., when the kinesis software displays the position "2.000 mm", the actual position might be "1.992 mm" up to "2.008 mm"?
Thank you very much. do'neill
(posted 2024-04-29 07:31:12.0) Thank you for your comment. Firstly the accuracy is symmetric and therefore ±8µm. This is, as you said, how close the position is to the "true" position, e.g. 1.992mm-2.008mm in your example. Where as bi-directional repeatability is how close it returns to the same value each time it is commanded to move to the same position.
I will reach out to you directly to discus your application in more detail. user
(posted 2024-02-01 13:29:32.017) Hello,
I am currently trying to control M30XY motor using python and it seems to work fine. But it keeps on stopping randomly and give the following error.
Device is not enabled
at Thorlabs.MotionControl.GenericMotorCLI.AdvancedMotor.GenericAdvancedMotorCLI.VerifyDeviceMovement(Int32 functionDepth, VerifyMovementFlags flags)
at Thorlabs.MotionControl.GenericMotorCLI.AdvancedMotor.GenericAdvancedMotorCLI.MoveTo(Decimal position, Int32 waitTimeout)
Thanks, cstroud
(posted 2024-02-12 08:06:40.0) Thanks for reaching out. I will contact you directly to help troubleshoot your script. Anway Pimpalkar
(posted 2023-12-15 16:50:37.453) I'm interested in using Python or MATLAB to control an M30XY stage. Could you please help me understand how that can be done? Thanks. do'neill
(posted 2024-01-02 11:55:24.0) Thank you for your enquiry. A minimum working example for controlling the M30XY using Python can be found on out GitHub at https://github.com/Thorlabs/Motion_Control_Examples/blob/main/Python/Benchtop/M30X(Y)/m30xy_pythonnet.py. user
(posted 2022-05-20 13:00:38.91) Hi Thorlabs Team, I have found example code to control the KDC101 with python using the ctypes library, but was wondering if the example code DJayasuriya sent Jisoo Kyoung on 2021-10-29 08:40:58 was specifically for the M30XY? If so, could you please send it to me via email? Thanks DJayasuriya
(posted 2022-05-24 04:40:03.0) Thank you for your inquiry. We will get in touch with you directly to helpd with your request. G Beach
(posted 2022-05-17 16:13:00.657) Hello! I have been trying to control the M30XY stage using python as well, but am having trouble. Would you be able to share the example code with me in the text of an email? Thank you for your help! cwright
(posted 2022-05-18 08:31:03.0) Response from Charles at Thorlabs: Thank you for your query. We will reach out to you to discuss programming this device in Python. user
(posted 2022-05-10 18:37:45.43) Hello, I'm also interested in using Python to control an M30XY stage. Could I please be sent the example code DJayasuriya sent Jisoo Kyoung on 2021-10-29 08:40:58? Thank you! DJayasuriya
(posted 2022-05-11 05:49:05.0) Thank you for your inquiry, of course, I've have got in touch with you directly. Anandh Balakrishnan
(posted 2022-03-11 17:22:10.067) Hi there-
I have purchased this system. Just a quick clarification-
Since the control algorithm is built in, do I really need to connect the TTL ports to an external trigger? Can I not just use Kinesis SW via the USB to control the stage bidirectionally?
Are the triggers to provide an external event driven control?
Best
Anandh DJayasuriya
(posted 2022-03-25 10:24:13.0) Thank you for your inquiry. Yes you are able to use Kinesis with out the TTL ports being connected. We have got in touch with you directly to discuss your application. Juwon Oh
(posted 2022-02-03 14:11:51.903) Dear whom to concern it
Hi, this is Juwon.
Now, I am trying to control your M30XY/M stage with Labview program.
I tried to NET control with KCubeDCServoControl in Thorlabs.MotionControl.Controls.dll. (I also tried it with TCubeDCServoControl, BenchtopDCServoControl and BenchtopBrushlessControl).
But all is failed with error message "No Suitable Devices Found".
Can you give me some advice to use this stage with Labview program?
Best wishes,
Juwon cwright
(posted 2022-02-03 05:44:36.0) Response from Charles at Thorlabs: Thank you for your query. BenchtopDCServoControl is the correct control. Usually this issue could be caused by having the device already open in another piece of software. Alternatively there may be a missing feature in your VI. We will reach out to you to troubleshoot your VI. Jisoo Kyoung
(posted 2021-10-27 21:08:23.77) Dear Thorlabs,
Hi, I am interested in your M30XY/M.
I would like to control the M30XY/M by Python code.
Is it possible to use Python instead of Kinesis Software?
If you have any example code, please send me.
Thanks. DJayasuriya
(posted 2021-10-29 08:40:58.0) Thank you for your inquiery, Yes we do provide the DLLs files when Kinesis or APT software is installed. Using the DLLs provided you would be able to use Python to write your code. I will get in touch with you directly with the example code. |

 ズーム
ズーム
Click for Details
ステージの図面
- XおよびY方向の移動量: 30 mm
- 双方向再現性: ±1.0 µm
- 最小移動量: 2.5 µm
- デッキ高: 40 mm
- USB経由でのPCによるリモート制御
- I/Oポートを介した双方向の外部トリガ(5 V TTL)
こちらの2軸電動移動ステージは、1軸あたり距離30 mmの安定した精密直線移動と、滑らかで再現性の高い動作が可能です。115 mm x 115 mmの大型のプラットフォームに最大5.0 kgまでの負荷を搭載し、最大速度2.4 mm/sで移動できます。ステージM30XY/Mはモノリシック構造のため、分解して2つの1軸ステージにすることはできませんのでご注意ください。
USBコネクタを介して、Kinesis® 制御用ソフトウェア(一式)によるPC制御が可能です。2つのI/Oポートにより、双方向での外部トリガ(5 V TTL)が可能です。それらのポート用に、各ステージにはケーブルCA3272が2本付属します。交換用のケーブルは別売りでご提供しています(下記参照)。ステージには国内用電源が付属します。

 ズーム
ズーム
Click to Enlarge
ケーブルクランプM30A1を取付けたステージM30XY(/M)(それぞれ別売りです)
- XZまたはXYZ移動にするための垂直取付け用ブラケットM30A2/M
- ケーブル保持用クランプM30A1
直角ブラケットM30A2/MはステージM30XY/Mを垂直に取り付けるために設計されています。各ステージのベースの四隅に取付穴が付いており、4本のM6 x 1.0キャップスクリュで取付ブラケットに固定できます。精密にアライメントできるように、各面にはØ3 mm位置決めピン用の穴があります。XYステージは、コネクタが上を向いた状態で直角ブラケットに取り付ける必要があります。垂直方向に取り付けるときには、接続されたケーブルの支持用にケーブルクランプM30A1を使用することをお勧めします。なお、M30XY/Mを垂直移動用に取り付けた場合は、耐荷重は2.0 kgに減少します。
ケーブルクランプM30A1は、ステージM30XY/Mに接続されたケーブルをサポートして保持します。ステージを垂直方向に取り付けたり、ほかのステージやアセンブリの上に取り付けたりするときには、このケーブルクランプの使用を推奨します。

 ズーム
ズーム- 移動ステージM30XY/Mのトリガーポート用ケーブル
- MMCXオスコネクタとBNCまたはSMAのオスコネクタ付き
- 周波数範囲:DC~6 GHz
- インピーダンス: 50 Ω
- 最大動作電圧: 170 V
こちらのケーブルを使用して、ステージM30XY/MにI/Oポート経由で外部トリガ信号の入出力が可能です。ケーブルCA3339(長さ1 m)およびCA3272(長さ1.8 m)にはBNCオスコネクタ、CA3439(長さ1 m)にはSMAオスコネクタが付いています。