 Products Home
Products Home薄型電動XY走査ステージ
- Precise XY Scanning with <5.0 µm Position Accuracy
- Low-Profile, Compact Footprint
- Compatible with Thorlabs' Cerna®, Nikon, and Olympus Microscopes
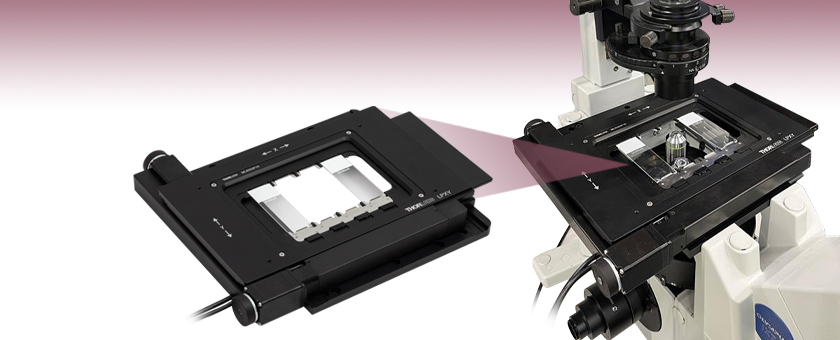
LPXY1
Stage Shown with MLS203P10 Slide Holder
LPXY1 Stage with MLS203P10 Slide Holder Shown Mounted to an Olympus IX71 Inverted Microscope


















Please Wait

Click to Enlarge
走査ステージLPXY1をブレッドボード取付け用アダプタMLS203P5に取付け、
さらにそれをブラケットセットMLSA01を用いて光学テーブルに取り付けています
(写真ではステージのフィンガーガードは取り外しています)。
特長
- Nikon製、Olympus製および当社Cerna®シリーズの正立および倒立顕微鏡に組込み可能
- 試料へのアクセスが容易な小型設計
- 位置決めの安定性に優れたステッピングモータによる制御
- 精密加工された高品質のリニアベアリング
- さまざまなサンプルホルダをご用意
- 当社のKinesis®ソフトウェアに対応
当社の薄型電動XY顕微鏡ステージは、Nikon製、Olympus製およびCerna®シリーズの顕微鏡用手動式ステージの代わりとして、簡単に置き換えられるように設計されています。この置き換えによって、顕微鏡試料のXY位置決めが電動でできるようになります。完全なステージシステムを構築するには、ステージ、コントローラ、取付け用ブラケット、光学アクセサリが必要ですが、それらのコンポーネントは全て別売りになっています。下の表には、それぞれの顕微鏡ごとに必要なステージシステム用コンポーネントが記載されています。そのほか、別売りの取付け用アダプタを使用すると、ステージを光学テーブルやブレッドボードにボルトで固定することができ、カスタム仕様の顕微鏡セットアップの一部として、あるいは一般的なフォトニクス用途向けとしてご利用いただけます。
顕微鏡ステージLPXY1は、開ループ制御のステッピングモータを使用しており、小型で耐久性があり、またコスト効率も高い走査ステージです。このステージは、試料にアクセスしやすくするために外側にモーターハウジングが付いいません。またステッピングモータを用いることで、優れた位置決めの安定性と適切な低速動作性能を実現しています。ステージLPXY1は可動回路を無くすことで寿命と耐久性の最大化を図り、顕微鏡下でのルーティン的な位置決め用として優れた信頼性と高いコスト効率を実現しています。このステージと当社のZ軸ピエゾステージを組み合わせると、レーザ走査型顕微鏡用に適したXYZステージを構築することもできます。高速性が要求される用途向けには、高速電動XY走査ステージMLS203-1をご用意しております。このステージの顕微鏡との適合性は走査ステージLPXY1と同じです(下表参照)。
校正ファイル
各走査ステージLPXY1は製造工程で校正されています。校正することで、システムに内在する機械的誤差を補正できます。送りネジやリンク機構などの機械部品は、一定の許容誤差をもって製造されます。このような機械的誤差により、指定された位置と実際の位置の間に偏差が生じます。しかしこのような偏差には再現性があるため、Kinesisソフトウェアと付属の校正ファイルを使用して補正することができます。これらのファイルを用いて、ソフトウェアはユーザが入力した位置情報を機械的な動作に変換します。校正ファイルは下記の型番横の赤いアイコン )
)
校正ファイルの使用は任意です。使用しなくてもステージの再現性と分解能は変わりませんが、正確さを向上させるための補正は行われません。一方で、各ステージは工場で校正されているため、校正ファイルを使用しなくても軸上の典型的な正確さは5 µm未満になります。
コントローラ
走査ステージLPXY1は、すべてのBSC200シリーズのベンチトップ型ステッピングモーターコントローラに対応します。2軸制御用には、2チャンネルコントローラBSC202をお勧めします。コントローラの概要については下記の製品紹介をご覧ください。詳細については こちらのページをご覧ください。コントローラBSC202は当社のKinesisおよびAPT™ソフトウェアセットの両方に対応しています。しかしステージLPXY1は、モータに正しいレベルの電流を供給するためにKinesisソフトウェアでのみ駆動してください。APTソフトウェアを使用すると機械的な故障が生じる可能性があります。
試料ホルダおよびアクセサリ
当社では一般的な顕微鏡スライド、マルチウェルプレート、ペトリ皿、マウント済み金属試料などの位置決め用としてご利用いただける、様々なアダプタをご用意しています。詳細は下記の製品紹介をご参照ください。
顕微鏡用ステージアセンブリ
| Microscopea | XY Stage / Controller | Mounting Bracket | Optional Specimen Holders and Accessories |
|---|---|---|---|
| Thorlabs Cerna | LPXY1 Stageb / BSC202 Controllerc | CSA1000 | MLS203P2: Petri Dish / Slide Holder for Inverted Microscopes MLS203P10 & MLS203P13: Multiple Slide Holders for Upright and Inverted Microscopes C4SH01: Multi Slide Holder for Inverted Microscopes MLS203P1: Multiwell Plate Adapter MLS203P3: Blank Adapter Plate MLS203P5: 1/4"-20 Tapped Breadboard Plate MLS203P4: M6-Tapped Breadboard Plate MJC2: 2-Axis Microscopy Joystick |
| Nikon 50i, 80i, 90i, and Ci-L | MLSA06 | ||
| Nikon TE2000 and Eclipse Ti | MLSA03 | ||
| Nikon Eclipse FN1 | MLSA07 | ||
| Olympus BX41, BX43, BX51, BX53, and BX61 | MLSA08 | ||
| Olympus IX51, IX71, IX73, IX81, and IX83 | MLSA02 | ||
| Olympus IX70 | MLSA09 | ||
| Optical Breadboard / Custom Configuration | MLSA01 or MLSA04 |
| LPXY1 Stage | |
|---|---|
| Travel Range | 110 mm x 75 mm (4.33" x 2.95") |
| Speed (Max) | 25 mm/s |
| Velocity Stability | < 1.27 mm/s |
| Acceleration (Max) | 400 mm/s2 |
| Bidirectional Repeatability | < ±1.5 µm |
| Unidirectional Repeatability | < ±1.5 µm |
| Minimum Repeatable Incremental Movement | 0.1 µm |
| Calibrated On-Axis Accuracy | < ±5.0 µm |
| Home Location Accuracy | < ±2.5 µm |
| Load Capacity (Max)a | 1 kg (2.2 lb) |
| Pitch Angular Deviation | ±150 µrad |
| Yaw Angular Deviation | ±150 µrad |
| Horizontal Straightness | ±3 µm |
| Vertical Straightness | ±3 µm |
| Limit Switches | X and Y as Standard |
| Bearing Type | High Rigidity Recirculating Precision Linear Bearing |
| Motor Type | Stepper Motor |
| Step Angle | 1.8° (200 Step Motor) |
| Step Accuracy | 5% |
| Microsteps per Full Step | 2048 |
| Microsteps per Revolution of Motor | 406,600 (For 200 Step Motor) |
| Dimensions (Mid Travel, Excluding Guards) | 310.1 mm x 255.6 mm x 32.3 mm (12.21" x 10.06" x 1.27") |
| Weight (Including Cables) | 3.0 kg (6.6 lbs) |
| Recommended Controller | BSC202b |
| BSC202 Controller | |
|---|---|
| Input and Output | |
| Motor Drive Connector (15-Pin, D-Type Female) | 2-Phase Bipolar Motor Drive Output Differential Quadrature Encoder (QEP) Input Forward, Reverse Limit Switch Inputs Encoder 5 V (with Ground) |
| Control IO Connector (15-Pin, D-Type Female) | Jog Forward/Back Input (TTL) User Logic Input/Output (TTL) Single-Ended Analog Input (0 - 10 V) User 5 V (with Ground) 100 mA Max Trigger Input/Output (TTL) |
| Motor Resolution | |
| Microsteps per Full Step | 2048 |
| For 200 Step Motor | 409,600 Microsteps/Rev |
| Motor Drive Voltage | 48 V |
| Motor Drive Power | Up to 50 W (Peak) / 25 W (Average) |
| Motor Speeds | Up to 3000 RPM (200 Full Step Motor) |
| Encoder Feedback Bandwidth | 500 KHz (500,000 Counts/s) |
| Input Power Requirementsa | |
| Voltage | 85-264 VAC |
| Power | 200 W (Peak) |
| Fuse | 3.15 A |
| General | |
| Housing Dimensions (W x D x H) | 240 mm x 360 mm x 133 mm (9.5" x 14.2" x 5.2") |
| Weight | 6.7 kg (14.75 lbs) |
| Compatible Motor Specifications | |
| Peak Powers | 15 to 50 W |
| Average Power | 25 W (Max) |
| Step Angle Range | 20° to 1.8° |
| Coil Resistance (Typical) | 4 - 15 Ω |
| Coil Inductance (Typical) | 4 - 15 mH |
| Rated Phase Currents (Typical) | 0.1 - 1 A |
電動走査ステージLPXY1のピン配列
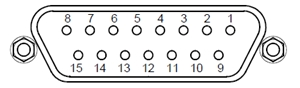
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Not Connected | 9 | CW Limit Switch |
| 2 | Not Connected | 10 | CCW Limit Switch |
| 3 | Not Connected | 11 | 0 V User |
| 4 | Not Connected | 12 | For Future Use |
| 5 | 5 V User | 13 | For Future Use |
| 6 | Identification | 14 | Motor Phase B+ |
| 7 | Motor Phase B- | 15 | Motor Phase A+ |
| 8 | Motor Phase A- | - | - |
各軸用に、それぞれBSC200シリーズコントローラに接続するための15ピンD型コネクタが付いています。
BSC200 Seriesシリーズコントローラのピン配列
制御I/Oコネクタ
| Pin | Description | Return | Pin | Description | Return |
|---|---|---|---|---|---|
| 1 | User 5 V I/O | 9 | 9 | User 0 V | - |
| 2 | Jog Forwardsa | 9 | 10 | Jog Forwardsa | 9 |
| 3 | Not Used | 9 | 11 | Analog Inb | 9 |
| 4 | Trigger In | - | 12 | Trigger Out | 9 |
| 5 | User 0 V | - | 13 | Not Used | 5 |
| 6 | Not Used | - | 14 | Not Used | 6 |
| 7 | Digital (User) In | - | 15 | Digital (User) Out | 9 |
| 8 | Keyed Pin | - | - | - | - |
モータードライブコネクタ
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | Encoder A +ve | 9 | CW Limit Switch |
| 2 | Encoder A -ve | 10 | CCW Limit Switch |
| 3 | Encoder B +ve | 11 | 0 V User |
| 4 | Encoder B -ve | 12 | For Future Use |
| 5 | 5 V User | 13 | For Future Use |
| 6 | For Future Use | 14 | Motor Phase B+ |
| 7 | Motor Phase B- | 15 | Motor Phase A+ |
| 8 | Motor Phase A- | - | - |
PC接続
USB Type B
A-BタイプのUSBケーブルが付属します。
| Pin | Description |
|---|---|
| 1 | RX (Controller Input) |
| 2 | Ground |
| 3 | Ground |
| 4 | +5V, 100 mA Power Supply |
| 5 | TX (Controller Output) |
| 6 | Ground |
当社のKinesis®ソフトウェアは、KinesisおよびAPT™シリーズのデバイスの制御にご使用いただけます。小型で低出力のシングルチャンネルドライバ(K-CubeやT-Cubeなど)から、高出力でマルチチャンネルの19インチラックナノポジショニングシステム(APTラックシステム)まで、幅広い種類のモーションコントローラに対応しています。
Kinesisソフトウェアでは新しい.NETコントロールが使用できるため、サードパーティの開発者が最新のC#、Visual Basic、LabVIEW™、あるいはその他の.NETに対応する言語を使用してカスタムプログラムを作成することができます。また、.NETフレームワークを使用しないアプリケーション用にローレベルのDLLライブラリも付属します。中央シーケンスマネージャは、当社のすべてのモーションコントロール用ハードウェアの統合と同期をサポートしています。
これらの共通のソフトウェアプラットフォームにより、1種類のソフトウェアツールを習得するだけで、あらゆるAPTおよびKinesisコントローラを1つのアプリケーションの中で簡単に組み合わせることができます。低出力の1軸システムから高出力の多軸システムまでのあらゆるコントローラを組み合わせ、全てを1台のPCのソフトウェアインターフェイスから制御できます。
このソフトウェアパッケージには2つの使い方があります。1つはGUI(グラフィカルユーザーインターフェイス)ユーティリティを用いる方法で、商品到着後すぐにコントローラの直接的な操作と制御を行なうことができます。もう1つは一連のプログラミングインターフェイスを用いる方法で、選択した開発言語でカスタム仕様の位置決めやアライメント用のプログラムを簡単に作成することができます。
ソフトウェア
Kinesisバージョン1.14.49
このKinesisソフトウェアパッケージには、KinesisおよびAPT™システムコントローラを制御するためのGUIが含まれています。
下記もご用意しております。
- 通信プロトコル

Kinesis用GUI画面
Kinesis®ソフトウェアでは新しい.NETコントロールが使用でき、最新の最新のC#, Visual Basic, LabVIEW™、ほかの.NET対応言語を使用する開発者がカスタムにプログラムを作成することもできます。
C#
このプログラミング言語はマルチプログラミングパラダイムやマルチプログラミング言語が使用可能となるよう設計されているため、複雑な問題が簡単かつ効率的に解決できます。型付け、命令型、宣言型、関数型、ジェネリック、オブジェクト指向、そしてコンポーネント指向が含まれます。 この共通のソフトウェアプラットフォームにより、1セットのソフトウェアツールを習得するだけで、あらゆるKinesisコントローラを簡単に組み合わせることができます。このようにして1軸システムのコントローラから多軸システムのコントローラまで、様々なコントローラを組み合わせ、全てを1台のPCのソフトウェアインターフェイスから制御することが可能となりました。
Kinesisシステムソフトウェアを使用するには2つの手段があります。コントローラを直接つないで制御を行なう付属のGUI(グラフィカルユーザーインターフェイス)ユーティリティ、またはご希望の開発言語でカスタム仕様の位置決めやアライメントを簡単にプログラムできる一連のプログラミングインターフェイスです。
Kinesisモーションコントロールライブラリの構築の参考となる実行可能なプロジェクト機能拡張例については下のリンクをクリックしてください。なお、Quick Startのプロジェクト例の実行には別の統合開発環境(IDE)(Microsoft Visual Studioなど)が必要です。C#のプロジェクト例はKinesisソフトウェアパッケージに付属する.NETコントロールで実行可能です(詳細は「Kinesisソフトウェア」タブをご覧ください)。
 | Click Here for the Kinesis with C# Quick Start Guide Click Here for C# Example Projects Click Here for Quick Start Device Control Examples | |
LabVIEW
LabVIEWは、.Netコントロールを介してKinesisまたはAPTベースのコントローラとの通信に使用できます。LabVIEWでは、ツールとオブジェクトでフロントパネルとして知られるユーザーインターフェイスを構築した後、グラフィカル表記の関数を使ってコードを追加し、フロントパネルのオブジェクトを制御します。下記のLabVIEWチュートリアルでは.Netコントロールを使用してLabVIEW内KinesisまたはAPT駆動デバイス用の制御GUIを作成するための情報をご提供しています。 LabVIEWでコントローラを制御する基本的な方法や、LabVIEW GUIを用いてデバイスを操作する前に行うべき設定の手順についても解説しています。
 | Click Here to View the LabVIEW Guide Click Here to View the Kinesis with LabVIEW Overview Page | |
| Posted Comments: | |
user
(posted 2024-05-27 11:48:22.603) Can this product be used in nitrogen atmosphere at temperatures ranging from -40°C to +40°C? cstroud
(posted 2024-06-04 07:02:39.0) Thanks for reaching out. Our stages are usually rated for operational temperature ranges of +5 degrees to +40 degrees (non-condensing), along with the controllers. The storage temperature would also have a similar range. Anything outside of this could cause a failure due to expansion/contraction of the stage, and changes in viscosity of the grease used. We will contact you directly to discuss this further. |

 ズーム
ズーム| Key Specificationsa | |
|---|---|
| Travel Range | 110 mm x 75 mm (4.3" x 2.95") |
| Velocity (Max) | 25 mm/s |
| Acceleration (Max) | 400 mm/s2 |
| Bidirectional Repeatability | < ±1.5 µm |
| Unidirectional Repeatability | < ±1.5 µm |
| Horizontal Load Capacity (Max)b | 1 kg (2.2 lb) |
| Min Achievable Incremental Movement | 0.1 µm |
| Home Location Accuracy | < ±2.5 µm |
| Calibrated On-Axis Accuracy | < ±5.0 µm |
走査ステージLPXY1は、顕微鏡に搭載された手動ステージの代わりとして、ドロップイン式で置き換えることができる製品です。 このステージは開ループ制御のステッピングモータを使用しており、低速でXY位置決めを行うことができる、小型で信頼性とコスト効率の高い製品です。このステージは、当社のCerna®顕微鏡のほか、Nikon製やOlympus製の倒立および正立顕微鏡に対応します。ステージをそれぞれの顕微鏡に取り付けるためのアダプターブラケットを、別売りでご用意しております。また、テーブルトップ取付け用のアダプタもご用意しており、それでステージを光学テーブルやブレッドボードにボルトで固定し、カスタム仕様の顕微鏡セットアップの一部として、あるいは一般的なフォトニクス実験用としてご使用いただくこともできます(詳細は下記参照)。

 ズーム
ズーム- 精密位置決め用の高分解能マイクロステップ制御
- 制御用ソフトウェア一式が付属
- 直感的操作が可能なグラフィック制御パネルを表示するソフトウェア
- 拡張型ActiveX®プログラミングインターフェイス
走査ステージLPXY1は、すべてのBSC200シリーズのベンチトップ型ステッピングモーターコントローラに対応します。2軸制御用として、2チャンネルコントローラBSC202をお勧めします。このコントローラでは、当社の制御ソフトウェアKinesis®とプログラミングインターフェイスをご利用いただくことができ、自動顕微鏡システムに簡単に組み込むことができます。 ステッピングモータは、DCサーボモータよりも低速動作性能と位置決めの安定性が優れています。 また、USB接続やフル機能のグラフィカルユーザーインターフェイス(GUI)パネルに加え、ユーザを広範にサポートするソフトウェア一式も付属します。これにはすぐに使える多くのユーティリティが含まれており、細かな事前設定などをしなくても直ちに操作を開始することができます。 さらに、これには全機能を備えたActiveX®プログラミング環境も含まれており、LabVIEW、C++、MATLABなどの様々なプログラミング環境でカスタム仕様のアプリケーションを開発できるようにサポートしています。
標準的なUSBハブを介して複数のユニットを1台のPCに接続することができます。例えば、ステージLPXY1用のコントローラBSC202と、Z軸ピエゾステージキットMZS500-Eに付属するコントローラの両方を、1台のPCで同時に操作できます。この機能と使いやすいKinesisソフトウェアを組み合わせることで、複雑な動作シーケンスを素早くプログラムして実行することができます。コントローラBSC202の詳細については、上の「仕様」タブまたはベンチトップ型ステッピングモーターコントローラの製品ページをご覧ください。
当社では、ステージLPXY1をNikon製、Olympus製、および当社の正立および倒立顕微鏡に取り付けるためのブラケットをご用意しています。各顕微鏡との適合性については下の表をご参照ください。各ブラケット(CSA1000を除く)には顕微鏡へのステージの取付け方法を記載した説明書が付いています。
| Click Image to Enlarge |  |  |  |  |  |  |  |  |  |
| Item # | CSA1000 | MLSA06 | MLSA03 | MLSA07 | MLSA08 | MLSA02 | MLSA09 | MLSA01 | MLSA04 |
| Microscope Brand | Thorlabs | Nikon | Olympus | Optical Breadboard, Custom Configurationa | |||||
| Microscope Model | Cerna® | 50i, 80i, 90i, Ci-L | TE2000, Eclipse Ti | Eclipse FN1 | BX41, BX43, BX51, BX53, BX61 | IX51, IX71, IX73, IX81, IX83 | IX70 | N/A | |
| Microscope Type | Upright | Upright | Inverted | Upright | Upright | Inverted | Inverted | N/A | |
当社ではOlympus社、Nikon社、Zeiss社、Leica社の顕微鏡に対応する製品をご用意しております。お手持ちの顕微鏡が上の表に記載されていない場合、対応可能なブラケットの入手可能性については当社までお問い合わせください。 |
| Item # | Features | Photo |
|---|---|---|
| MLS203P2 |
|  |
| MLS203P10 |
|  |
| MLS203P13 |
|  |
| C4SH01 |
|  |
| MLS203P1 |
|  |
| MLS203P3 |
| |
| MLS203P5 |
|  |
| MLS203P4 |
|
- 走査ステージLPXY1に対応
- 顕微鏡用スライドホルダ、ペトリ皿ホルダ、アダプタープレート、ブランクアダプタープレートなどをご用意
- 標準的な顕微鏡や非標準的なカスタム用途向けに好適
走査ステージLPXY1用のアダプタープレートやスライドホルダをご用意しております。顕微鏡用スライド/ペトリ皿ホルダのMLS203P2や、顕微鏡用スライドホルダのMLS203P10、MLS203P13、C4SH01は、倒立顕微鏡や正立顕微鏡を用いた標準的な顕微鏡の用途にご使用いただけます。マルチスライドホルダのMLS203P10とMLS203P13には、精密なバネ式スライド保持機構、スライドに対する対物レンズのアクセスが双方向から可能な構造、XY移動面内での高い平行度といった特長があります。ブランクアダプタープレートのMLS203P3、タップ穴付きブレッドボード用プレートのMLS203P5およびMLS203P4は、ステージLPXY1を非標準的なカスタム用途に使用される際にご使用いただけます。これらのアダプタープレートおよびスライドホルダは、高速電動XY走査ステージMLS203-1にもご使用いただけます。

Click to Enlarge
別売りのマルチウェルプレートアダプタMLS203P1と顕微鏡用スライドホルダC4SH01が取付けられたステージLPXY1(ステージのフィンガーガードは取り外しています。)

 ズーム
ズーム- 走査ステージLPXY1に対応
- USB HIDプロトコルを使用した信頼性の高いジョイスティック
- ジョイスティックノブによる2軸制御
- 高速動作または高精度動作の2種類のモード
- 感度調整のための速度ダイヤル
- リモート手動操作が可能
- PCを用いて再プログラム可能
- 人間工学に基づいた設計
ジョイスティックコンソールMJC2は顕微鏡ユーザ向けに設計されており、ステージLPXY1などのXY移動ステージの位置決めを手動で直感的に行うことができます。このコンソールはXY制御に便利な2軸ジョイスティックです。ほとんどの用途では、コントローラに保存されているデフォルトのパラメータ設定値が利用できるため、ユーザ自身がさらに設定を行う必要はありません。したがってホストPCに接続する必要のない、真のリモート操作が実現されます。PCを使用してパラメータを再設定したとき、それをペアリングしたコントローラにも保存できます。そのため、PCとの接続を外してもリモート操作を継続できます。
ジョイスティックMJC2は、当社のステッピングモーターコントローラ、ベンチトップ型ブラシレスDCサーボモーターコントローラ、ラックマウント型ブラシレスDCサーボモーターコントローラに対応します。これらのコントローラやUSB HIDクラスを使うセットアップと組み合わせて使用できるように、ジョイスティックにはMini-DINポートとUSB Type-Cポートの両方が付いています。また、6ピンMini-DINプラグ-プラグケーブルとUSB 3.1 Type-A - Type-Cケーブルの2本のケーブルが付属します。USB HIDを使用したジョイスティックの設定やセットアップの詳細は、型番横の赤いアイコンをクリックしてマニュアルをご覧ください。このジョイスティックを旧製品のBSC10xシリーズと組合せて使用する場合は、対応するケーブルについて当社までお問い合わせください。